El conocer la posición y orientación de un vehículo en movimiento es el problema central de la navegación. A lo largo de la historia, este problema se ha resuelto de muchas maneras y entre éstas se encuentran el pilotaje y la navegación celestial.
El pilotaje consiste en identificar sitios conocidos referidos a un mapa y con esto determinar nuestra ubicación actual. De la identificación de por lo menos 3 puntos, es posible localizar nuestra posición en el mapa sobre la superficie terrestre. Este es el principio de sistemas como el GPS que se basan en información de posición y tiempo enviados por una constelación de satélites que actúan como puntos de referencia conocidos.
La navegación celeste se basa en el hecho de que en un instante dado, las posiciones observadas de las estrellas son únicas para un punto determinado en la Tierra, por lo que a través de conocer la posición (elevación y azimut) en el cielo de una o más estrellas de referencia en un momento determinado podemos establecer nuestra posición sobre la superficie de la Tierra.
La mayor parte de los sistemas de navegación tienen una característica en común: deben recibir información externa al vehículo para determinar su posición. Esta información puede ser en forma visual o de señales de radio como en el caso de buscar referencias conocidas, recibir señales GPS o nuestras propias señales radar una vez que rebotan en algún obstáculo. En contraste con lo anterior, los sistemas de navegación inercial son auto-contenidos, es decir, no requieren de la detección de señales externas. Se navega a través de detectar el movimiento del vehículo y calcular su cambio de posición a partir de conocer su estado inicial. Este tipo de sistema de navegación puede ser necesario cuando no se tenga acceso o no sea conveniente acceder a señales externas, como podría ser el caso de un submarino o un misil cuyo fuselaje esté sujeto a radiación ionizante.
Navegación inercial
La navegación inercial es una técnica de navegación autónoma que emplea mediciones de acelerómetros y giróscopos, y que permite, a través de cálculos, conocer la velocidad, posición y orientación de una nave a partir de un punto inicial con orientación y velocidad conocidos. Su principio de operación es muy simple: Si medimos la aceleración de un vehículo, podemos integrar la aceleración con respecto al tiempo para obtener la velocidad y luego integrar la velocidad para obtener posición. Por lo tanto, suponiendo que conocemos la posición y la velocidad iniciales, podemos determinar la posición del vehículo en cualquier momento posterior. Por otra parte, a través de los giróscopos podremos conocer el cambio de orientación del vehículo a partir de una orientación inicial.
Lo anterior, que en principio parece muy fácil, requiere de mediciones muy precisas de la aceleración en 3 ejes, la orientación del vehículo y, sobre todo del tiempo, ya que al calcular la velocidad y la aceleración de nuestro vehículo, cualquier error en la estimación de las variables anteriores se va acumulando por el proceso de integración, lo que tiende a hacer que el error se vuelva considerable con el paso del tiempo y resulte necesario ajustar el sistema frecuentemente empleando referencias externas. En la Figura 1 se muestra un ejemplo de un sistema de navegación inercial.

Fig. 1. Ejemplo de un sistema de navegación inercial comercial.
La Unidad de Medición Inercial
La Unidad de Medición Inercial IMU es el corazón de todo sistema de navegación inercial, su propósito es suministrar señales de aceleración con respecto a un sistema de referencia. Las unidades de medida (IMU) suelen contener tres giroscopios ortogonales y tres acelerómetros ortogonales que miden la velocidad y aceleración angular y lineal respectivamente. En la Figura 2 se muestra un diagrama esquemático de una Unidad de Medición Inercial.

Fig. 2 Diagrama esquemático de una Unidad de Medición Inercial
Tipos de sistemas de navegación inercial
De manera general, existen dos tipos de sistemas de navegación inercial principales y su diferencia es el marco de referencia en el que funcionan los giróscopos y los acelerómetros. Estos sistemas son: los sistemas de navegación inercial con plataforma estabilizada y los sistemas de navegación con sensores fijos a la estructura del vehículo.
Sistemas de navegación inercial con plataforma estabilizada
Los sistemas de navegación con plataforma estabilizada o sistemas cardán utilizan sensores montados en una plataforma que se mantiene aislada de cualquier movimiento rotacional externo. En otras palabras, la plataforma se mantiene alineada con el marco de referencia global, independientemente de los cambios en la orientación del vehículo. Esto se logra montando la plataforma a través de juntas universales (cardanes) que permiten que la plataforma gire con libertad en los tres ejes. Los giroscopios montados en la plataforma detectan las rotaciones de la plataforma y generan señales de error que retroalimentan a motores que giran los cardanes para cancelarlas y, por lo tanto, mantienen la plataforma alineada con el marco global.
Al permanecer en la misma orientación todo el tiempo, los acelerómetros miden los cambios de velocidad en cada una de las tres direcciones con respecto al sistema de referencia externo y los giróscopos miden el cambio de orientación. La computadora realiza dos integraciones numéricas separadas en los datos que recibe del sistema de guía inercial. Primero integra los datos de aceleración para obtener la velocidad del vehículo y luego integra la velocidad para determinar la posición actual. En la Figura 3 se presenta un diagrama muy simplificado de un sistema de navegación inercial de plataforma estabilizada.
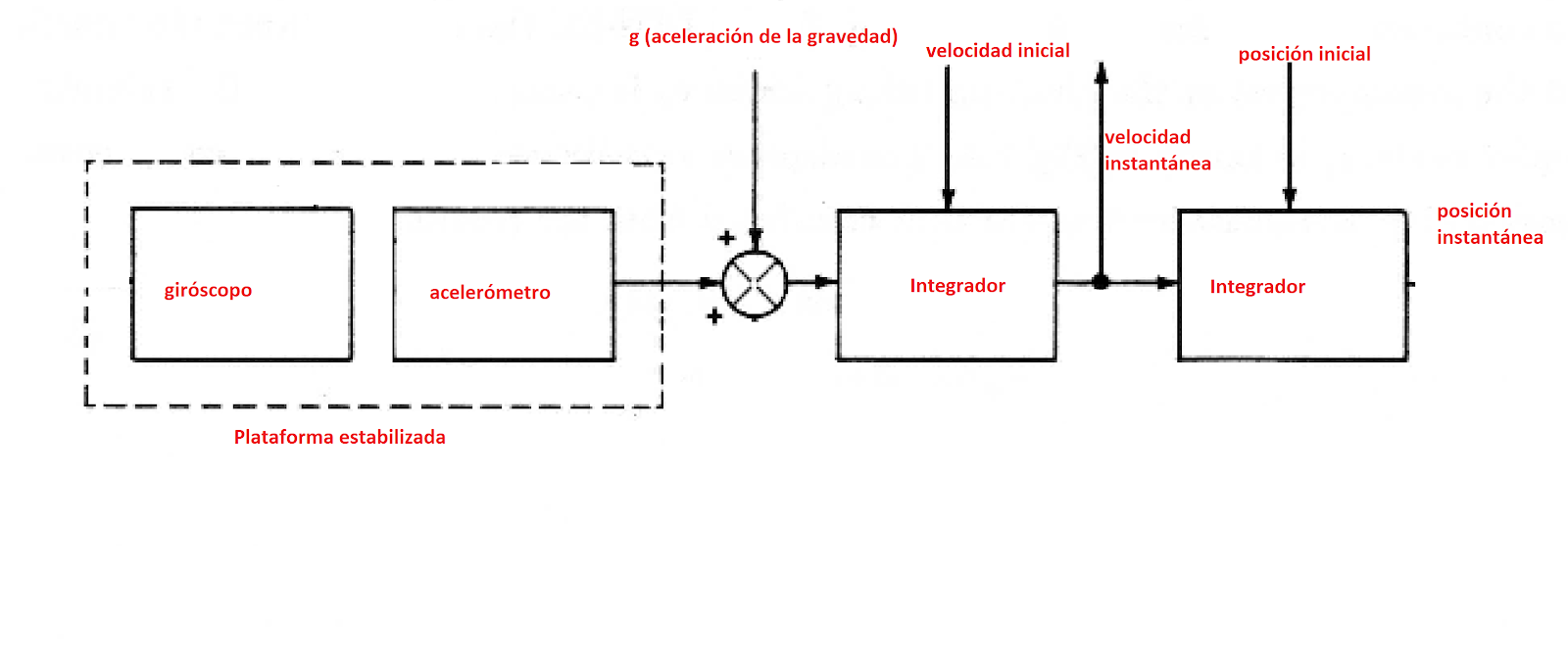
Fig. 3 Diagrama esquemático de un sistema de navegación inercial de plataforma estabilizada
Sistemas de navegación inercial con sensores fijos a la estructura del vehículo (strapdown systems)
En un sistema de navegación inercial con sensores fijos a la estructura del vehículo, conocidos en la literatura en inglés como strapdown systems, los acelerómetros están montados rígidamente al cuerpo del vehículo. En este caso, los giroscopios se utilizan para detectar las velocidades angulares de giro de la nave en tres direcciones ortogonales. La integración numérica doble, que combina las aceleraciones medidas y las velocidades angulares instantáneas, permite que la computadora determine la velocidad y posición actual de la nave. En la Figura 4 se muestra un diagrama conceptual de un sistema de navegación inercial con sensores fijos a la estructura del vehículo.
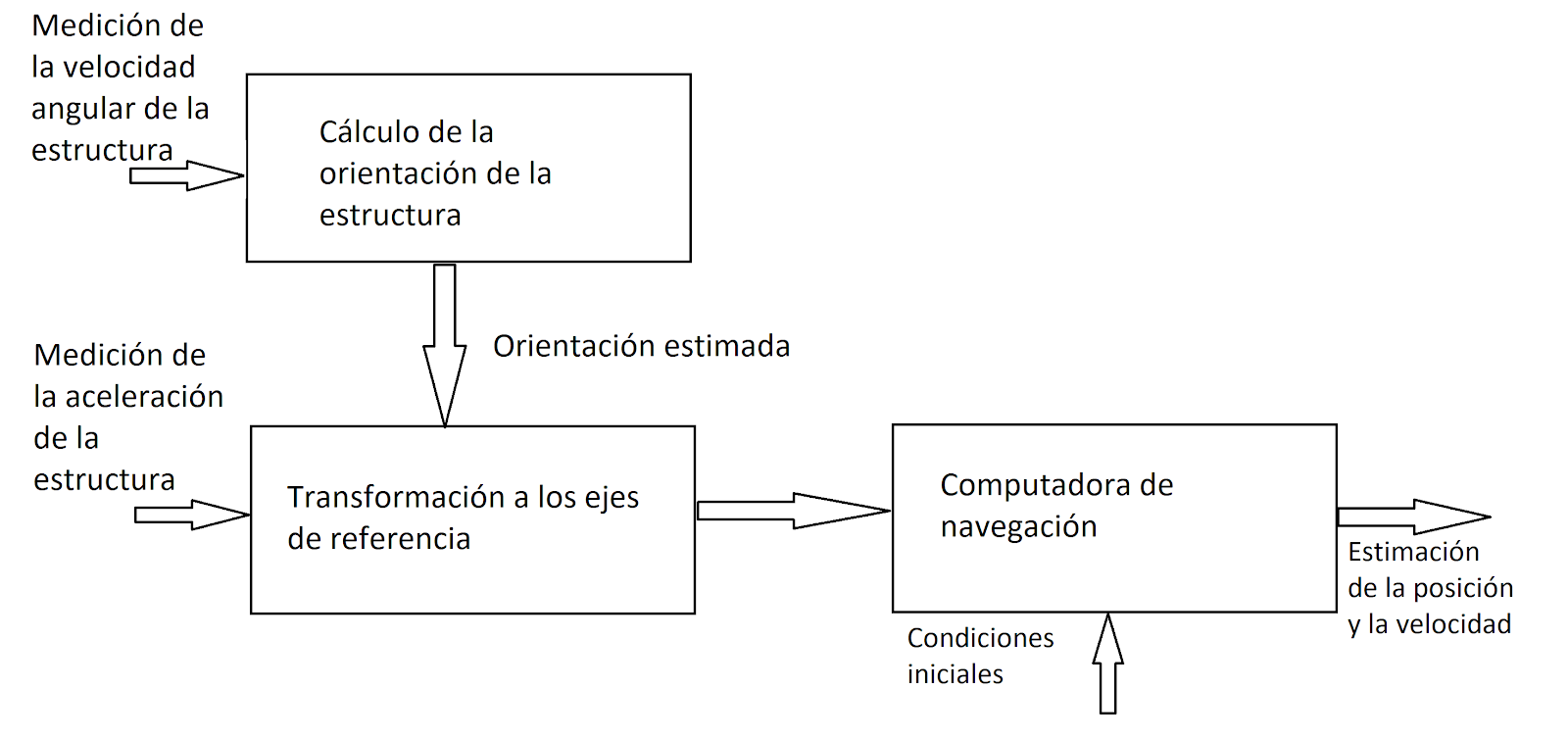
Fig. 4 Diagrama conceptual de un sistema de navegación inercial con sensores fijos a la estructura del vehículo
Tanto los sistemas de plataforma estabilizada como los sistemas con sensores fijos a la estructura del vehículo están basados en los mismos principios físicos. Los sistemas con sensores fijos a la estructura del vehículo, tienden a ser más pequeños, más livianos y menos complejos mecánicamente que los sistemas de plataforma estable, a expensas de requerir una mayor complejidad en los cálculos. Como el costo de la computación ha bajado drásticamente en los años recientes, los sistemas de navegación inercial actuales tienden a ser sistemas con sensores fijos a la estructura del vehículo.
A pesar de sus ventajas, la mayoría de los vehículos espaciales emplean sistemas de navegación híbridos, es decir, combinan la navegación inercial con otras técnicas de navegación que reciben información del exterior del vehículo. Esto se debe a que el error en la estimación de la velocidad y la posición del vehículo aumenta muy rápidamente con el tiempo por el proceso de integración, lo que hace necesario ajustar frecuentemente las condiciones iniciales. Aun así, los sistemas de navegación inercial juegan un papel importante en el control de los vehículos espaciales y su desarrollo sigue mejorando continuamente.