Una vez más podemos compartir con todos nuestros lectores un montaje muy práctico que nos ayudará a controlar la velocidad de mini motores de corriente directa. De esta manera estaremos en capacidad de controlar la velocidad a la que se desplaza nuestro robot, o bien la velocidad a que realiza cierta actividad que tiene de por medio un motor eléctrico de corriente directa.
Ya en otras ediciones hemos tenido oportunidad de trabajar con el legendario circuito integrado NE555, y bien, en esta nueva ocasión tenemos otra más de las aplicaciones de este sencillísimo circuito integrado.
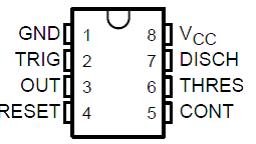
La distribución de terminales del NE555 es la siguiente:
Este integrado será el responsable de variar el ancho del pulso en la salida, que será aplicado al transistor que controlará nuestro motor. Esta técnica de control se denomina PWM o Modulación del Ancho del Pulso, y es especialmente interesante resaltar que con este pequeño circuito podemos controlar motores de hasta 20 Amperes, desde un 5 al 95% de su corriente, controlando de esta manera su velocidad de salida.
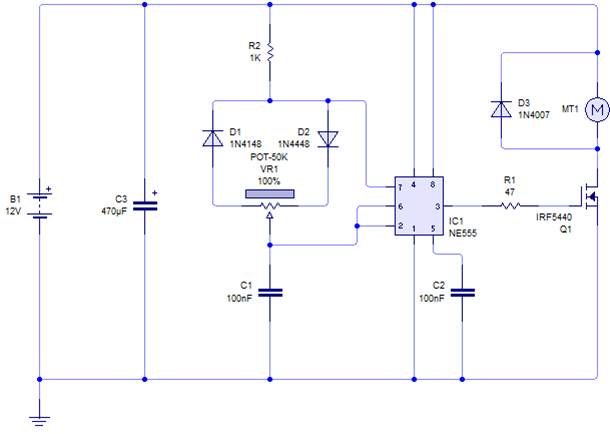
Como podemos observar en el esquema, los componentes externos son pocos, en primer plano observamos la presencia de un potenciómetro de 50 Kilo Ohms, cuya salida está conectada a las terminales “trigger” y “threshold” (gatillo y umbral), del 555, a la vez que se conecta a tierra mediante un capacitor de 100nF.
La terminal “discharge” (descarga), del 555, está conectada a una resistencia de 1Kilo Ohm que provee de tensión al potenciómetro.
Es muy importante darnos cuenta que debido a la instalación de los diodos D1 y D2, solo se permite el flujo de corriente en un solo sentido, ya sea para cargar el capacitor de 100nF o para descargarlo a través de la terminal “discharge” del 555.
Las terminales “reset” y “Vcc” se conectan a positivo, la terminal “ground” a negativo y la terminal “control” a negativo a través de un pequeño capacitor cerámico de 100nF.
La lista de materiales es la siguiente:
01 Protoboard grande.
01 Broche para pila 9V.
01 Pila “cuadrada” de 9V.
01 Circuito integrado NE555.
01 Resistor de 47 Ohms, 1/4 Watt (Amarillo, violeta, negro, oro).
01 Resistor de 1 Kilo Ohms, ¼ watt (Marrón, negro, rojo, oro).
01 Potenciómetro de 50 Kilo Ohms.
01 Capacitor electrolítico de 470uF, 25 volts.
02 Capacitor cerámico número 103.
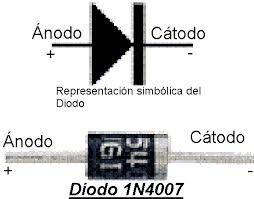
01 Diodo 1N4007.
02 Diodo 1N4148.
01 Transistor canal N, IRF5440 / También puede utilizarse el IRF530N.
01 Mini motor de corriente directa de 5 a 9 volts.
01 Metro de alambre estañado calibre 22 AWG negro.
01 Metro de alambre estañado calibre 22 AWG rojo.
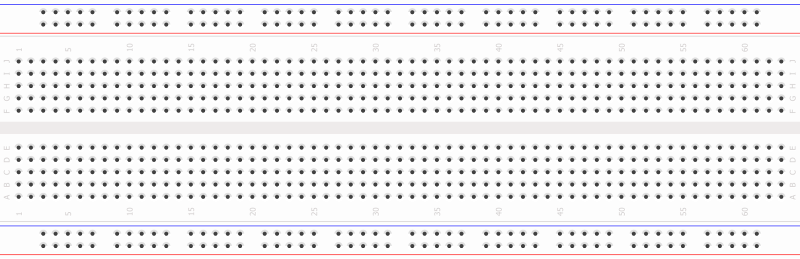
Pasemos a recordar rápidamente el aspecto de nuestro protoboard:
El broche para conectar nuestra pila de 9V y nuestra pila:


En cuanto a las resistencias o resistores, recordemos verificar los colores para asegurar que son del valor que requerimos, en la lista de materiales podemos obtener el código de color:

Nuestro circuito integrado NE555, recordemos identificar la marca que indica cual es la patilla número 1.

Observa bien la imagen del siguiente potenciómetro, es necesario que tenga esas terminales para poder colocarlo en el protoboard.

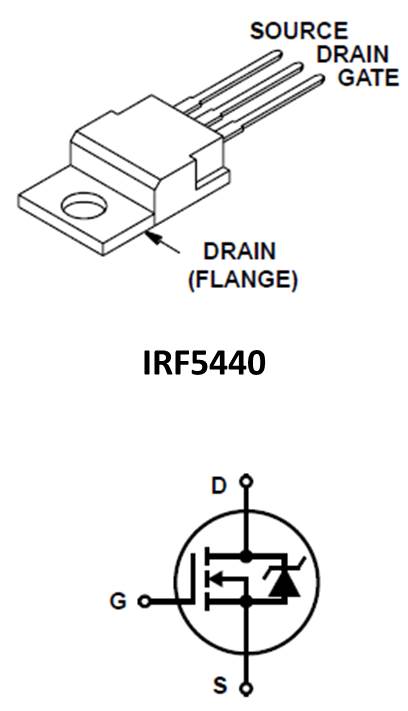
Para controlar la salida hemos dicho que utilizaremos un transistor canal N IRF5440, para ello, también se puede utilizar el IRF530N, observa e identifica las terminales del mismo a continuación:
Como prueba, utilizaremos un mini motor como el mostrado en la imagen, puede ser de cualquier voltaje, a no más de 9 Volts.

Ya identificados nuestros componentes, vamos a realizar el montaje de éstos en el protoboard de la siguiente manera:
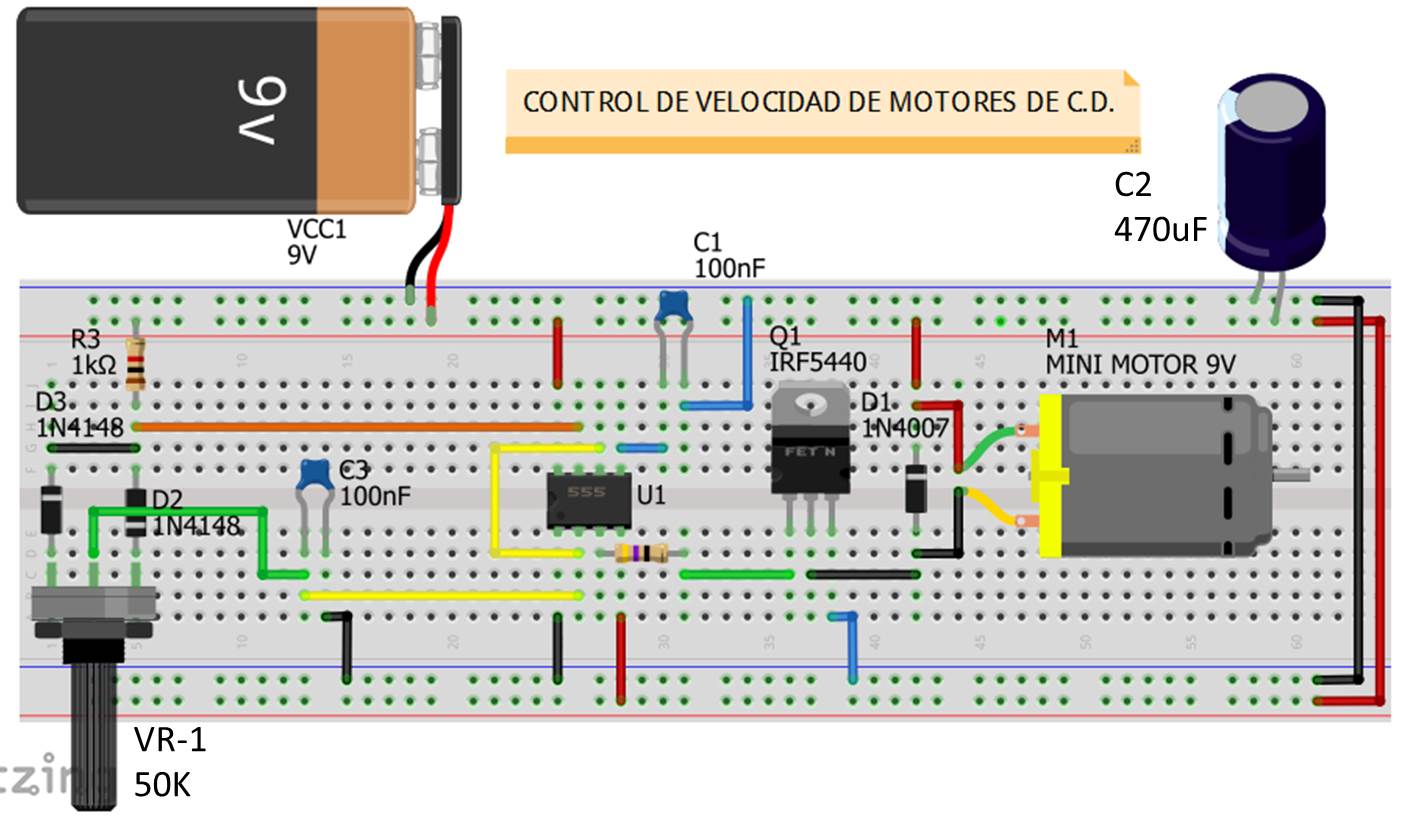
Es necesario aclarar que de acuerdo con la imagen, los diodos D1, D2 y D3, tienen una marca que indica su polaridad, de hecho esta marca en forma de banda negra o plata, indica la terminal negativa del diodo.
Si ya realizaste la revisión y todo está correcto, conecta tu pila de 9 volts y el motor deberá comenzar a funcionar; mueve el vástago del potenciómetro y observa lo que sucede con la velocidad del motor.
Si todo ha salido bien, podrás controlar la velocidad del motor mediante el potenciómetro!, con esto puedes controlar la velocidad a la que se desplaza tu robot móvil.
¿Qué sucede si en lugar del motor eléctrico conectas un diodo led? Inténtalo!.
Te recordamos visitar www.alldatasheet.com para descargar las hojas de datos de los componentes que utilizamos para conocer más sobre su funcionamiento.
Para cualquier duda o comentario, no dudes en contactarnos.
Israel Téllez González
elprofe_tellez@hotmail.com