En la actualidad existe mucho interés respecto a la posibilidad de utilizar vehículos que se puedan manejar solos, lo mismo en las carreteras que en las ciudades. Las compañías automotrices más importantes están trabajando ya para poner a la venta el “autopiloto” para la carretera a partir del año 2020. Lo primero es operar esos autos y más adelante, en bastantes años más, podrá salir a la venta el autopiloto para la ciudad. Sería formidable: el automóvil se convertiría así en un taxi, que nos puede llevar a cualquier punto de una megalópolis. Nosotros, como pasajeros, podríamos leer, enviar mensajes con el celular, dormitar, etc. Además estos taxis autónomos podrían recolectarme a mi, al vecino, a otra persona a lo largo del trayecto, para así compartir el automóvil. En lugar de tener millones de autos embotellando las calles, cada uno transportando a una sola persona, con conductores neurotizados, tendríamos solo aquellos vehículos estrictamente necesarios para transportar a la población. Desaparecerían los embotellamientos y todo mundo llegaría más pronto a su destino. El automóvil se convertiría en una pieza más del transporte público. Sería la “autopía” de los pasajeros felices.
Para llegar a tal nivel de desarrollo técnico se necesita que en las universidades se estudien estos temas de actualidad. Sin embargo, es muy difícil para una universidad o escuela técnica realizar la inversión que se requiere para poder operar vehículos robóticos. Es ahí donde intenta incidir el proyecto que la Universidad Libre de Berlín está desarrollando con universidades mexicanas durante 2016. La universidad berlinesa le entregará a diez universidades en México diez autos robóticos a escala 1:10, los mismos que pueden ser utilizados para cursos de robótica y mecatrónica. Este verano la Embajada de Alemania en México y el Instituto Politécnico Nacional entregarán los robots para que sean programados en nuestro país y así poder realizar así una carrera de autos robóticos a fines de 2016. La competencia se efectuará en una pista de carreras trazada sobre un piso de linóleum negro, en un antiguo gimnasio que ha sido habilitado como sala de eventos por el IPN.
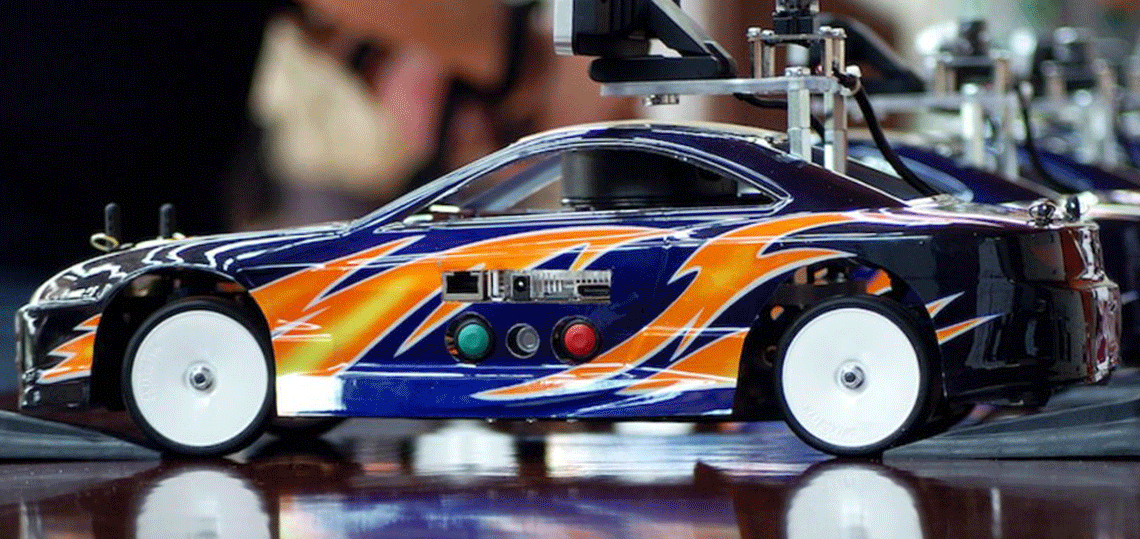
La Fig. 1 muestra el chasis del vehículo que ha sido diseñado. Es una armazón de automodelismo, con dirección, transmisión y suspensión. Sobre el chasis va instalada una tarjeta con un microprocesador en el que corre el sistema operativo Linux y un software especial para robótica llamado ROS (Robotic Operating System). Nuestra visión es que el mismo software que se necesita para operar carros a escala pueda ser utilizado para controlar vehículos reales. El auto a escala tiene las interfaces necesarias, entre ellas WiFi para comunicarse con un celular que funciona como control remoto para definir los parámetros del vehículo y así ponerlo a operar. Además los autos robóticos se pueden comunicar entre ellos.
El chasis del auto tiene montado un escáner de láser rotatorio (el cilindro negro visible en la Fig. 1). Con ese láser se puede detectar otros vehículos o bien obstáculos alrededor del carro. Las luces frontales y traseras del auto, las luces intermitentes, los frenos, el acelerador, así como la dirección se pueden todos operar por la computadora maestra.


El vehículo emplea motores Faulhaber muy precisos que pueden proporcionarle a la computadora maestra la odometría del recorrido ya realizado. Con una cámara que está apuntada hacia el techo se puede simular una unidad GPS. Con el GPS simulado, con la odometría y con un giroscopio se puede emular así a las unidades GPS extremadamente caras que se utilizan en vehículos autónomos.
Además de todo esto se ha montado un sensor tipo Kinect en el techo del auto. Con este sensor se obtiene una nube de mediciones que proporciona la estructura en tres dimensiones del entorno. Se trata de visión estereoscópica en tres dimensiones. Con esa información el auto puede detectar obstáculos en el camino y los puede evadir, siempre y cuando los programadores hayan tenido cuidado de escribir el software adecuado. La Fig. 2 muestra el auto ya configurado con todos los sensores.
Este proyecto es solamente el inicio de una colaboración más estrecha con las universidades mexicanas en el área de robótica móvil. Se inscribe en el marco del Año Dual México-Alemania, que tiene por objeto no ser un evento pasajero, sino un impulso para producir colaboraciones y desarrollos autosustentables en México. El Instituto Goethe en México coordina la realización del Año Dual.
Información sobre el Año Dual México-Alemania:
http://www.alemania-mexico.com/ano-dual-alemania-mexico/