Los Robots son mecanismos electrónicos programables que se han desarrollado para ayudar, colaborar o incluso reemplazar a los seres humanos, de ser necesario, en actividades muy detalladas, repetitivas, complicadas, difíciles o peligrosas. Pueden realizar complejos movimientos con velocidad, fuerza y un alto grado de precisión superiores a los que realizan los seres humanos, de una manera repetitiva, más segura y económica. Esto se logra mediante la integración de sistemas mecánicos, eléctricos, electrónicos y computacionales dentro de un mismo dispositivo programable con control automático, llamado Robot. El término “robot” fue acuñado por el dramaturgo checo Karel Căpek en 1921, que en su obra R.U.R. (Rossum Universal Robots) lo llamó “robotnik”, aunque posteriormente le llamó “roboti”, ya que la palabra Robota en checo significa Trabajo o Labor, entendiéndose “Robot” como Trabajo forzado o Servidumbre. Actualmente se considera que “un robot es una computadora con capacidad de movimiento, capaz de desarrollar múltiples tareas de manera flexible según su programación” [1]. La Robótica es la tecnología que reúne diversas áreas de la ingeniería y matemáticas para el diseño, construcción, operación, manufactura y aplicación de los robots en la vida diaria de los seres humanos. Por su parte, la Ingeniería Mecatrónica es la unión de las Ingenierías Mecánica, Electrónica, Informática y de Control, logrando sistemas con productos o procesos inteligentes orientados a facilitar las actividades del ser humano. La Mecatrónica es la ciencia que estudia a los robots que son controlados mediante una serie de instrucciones contenidas principalmente en programas de software.
Tipos de Robots.- Los robots se pueden clasificar de acuerdo a su tipo de control, siendo los Robots Manipuladores los más sencillos, donde se tiene un mecanismo con un sistema de control sencillo que permite realizar movimientos con una secuencia definida previamente por un operador. Después se tienen los Robots de Aprendizaje, donde un operador guía al robot en la secuencia de movimientos a repetir, éste la memoriza y posteriormente la repite mientras sea necesario. Después están los Robots con Control Sensorizado, donde la computadora tiene un controlador programado por software que ejecuta las órdenes para los movimientos que sean necesarios. Finalmente, se tienen los Robots Inteligentes, los cuales, además de lo anterior, tienen sensores que envían a la computadora de control el estado del proceso a controlar, por lo que estos robots autómatas pueden tomar decisiones de acuerdo a la información disponible, controlando el proceso automáticamente en tiempo real.
Robots de uso específico.- Los robots más populares a la fecha dentro de la manufactura son los Robots Industriales, particularmente los conocidos como “brazos manipuladores”, los cuales se encuentran ampliamente utilizados en plantas automotrices en todo el mundo, así como en fábricas industriales de variadas aplicaciones. El mayor atractivo de este tipo de robots es que pueden realizar tareas repetitivas, peligrosas y detalladas, sin poner en peligro la vida o salud de los trabajadores, además de que trabajan día y noche, no se equivocan ni se enferman, no hacen huelgas, etc. También hay Robots Mineros, Robots Militares, Robots Médicos, Robots Educativos, Robots Agrícolas, Robots para Diversión y Entretenimiento, etc. Sin embargo, cuando nos referimos a robots por lo general pensamos en robots similares a los seres humanos, llamados Robots Humanoides y Androides, que también son conocidos como Autómatas, o robots independientes. Robots Humanoides y Androides
Los Robots Humanoides son aquellos robots que tienen una distribución corporal similar a la de los seres humanos: Igual que nosotros, tienen dos extremidades inferiores para desplazarse, a manera de piernas y pies; una parte central a manera de torso, donde se encuentran las baterías y otro equipo de almacenamiento y apoyo. Cuentan con dos extremidades superiores a manera de brazos y manos para realizar acciones físicas; y tienen una cabeza donde se encuentran sensores que usan como dispositivos de entrada/salida para recibir señales de video, audio y otras señales físicas del mundo externo, así como su procesador central, o CPU, el cual envía señales de control al resto del cuerpo, igual que sucede en los humanos con el cerebro. Actualmente, un robot humanoide con circuitos, sistemas y programación lo suficientemente avanzada, ya puede realizar acciones similares a las de los humanos, tales como caminar, correr, andar en bicicleta o bailar, usando sensores tales como acelerómetros, antenas, cámaras y micrófonos, que le permitan realizar dichas acciones de manera automática e independiente de acuerdo a su programación previa. Sin embargo, los robots humanoides se pueden programar para hacer actividades comunes y repetitivas, aunque no tienen características externas diferentes e individuales entre ellos, por lo que parecen ser idénticos entre sí.
Por otro lado, los Robots Androides son aquellos robots que, siendo humanoides avanzados, tienen además características más sutiles que le hacen parecer diferente a otro androide similar, diferenciándose igual que las personas con características individuales tales como distinto cabello, rostro, manos, color de ojos o textura de piel artificial. Los Androides (de Andros, Hombre en Griego) o Ginoides (de Ginos, Mujer en Griego), son robots humanoides que se pueden parecer a un ser humano masculino o femenino, y que además pueden presentar características de individualidad entre ellos, tal como un rostro con facciones particulares, color de ojos, tono de voz artificial, estatura, etc. Los androides suelen tener una mayor capacidad de procesamiento, así como la capacidad de reconocer palabras y objetos mediante el reconocimiento de palabras, o de patrones de imágenes, que comparan con bases de datos para tomar decisiones de manera autónoma. A la fecha, existen robots androides y ginoides bastante avanzados, tanto en fases de investigación y desarrollo en la industria y academia, como comercialmente en algunos casos muy especiales.
Tanto Humanoides como Androides y Ginoides han sido ya puestos a trabajar como Robots de Servicio, ya sea en actividades de manufactura, enseñanza,capacitación, primeros auxilios, y otras aplicaciones de atención al humano. Existen robots para apoyo médico, enfermería y atención a ancianos, que en el caso de Japón es una de los principales detonadores de la robótica y mecatrónica humanoide. En Estados Unidos se están desarrollando robots humanoides y rovers para aplicaciones militares, de seguridad y vigilancia, en vehículos todo terreno, tanto terrestres (patas), como móviles (ruedas y tractor oruga) y aéreos (alas y hélices), que han tenido una gran demanda y financiamiento público y privado. También hay Robots Marinos y Submarinos, que usan aletas artificiales y hélices, para realizar actividades de exploración marina y submarina, como en los casos de recuperación de naufragios marinos, exploración del fondo del mar, estudio remoto de animales marinos o interacción con plataformas marinas de mediana y gran profundidad, donde los buzos, los submarinos y otros vehículos no pueden llegar.
Existen también Androides y Ginoides de Compañía, para personas solitarias o enfermas que requieren de constante monitoreo, así como Robots Educativos, que pueden suplir, complementar o sustituir profesores humanos en aspectos educativos básicos, tal como recitar lecciones, monitorear alumnos en exámenes, o evaluar su desempeño escrito y oral, grabando y comparando respuestas del tema de interés con una base de datos disponible.
Robots Espaciales
Operación en el medio ambiente espacial.- Desde sus inicios, los robots fueron diseñados para trabajar en actividades de apoyo a los humanos, por lo cual la inmensa mayoría de los robots se encuentra cerca de, si no es que junto a, los seres humanos con quienes colabora. Dado que los seres humanos nos encontramos en la superficie de la Tierra ya que necesitamos estar dentro de la atmósfera para sobrevivir, es aquí donde también se encuentran casi todos los robots que existen en la actualidad. Sin embargo, desde los inicios de la Carrera Espacial y de la Exploración para la Conquista del Espacio, a principios de la década de 1960, se ha hecho uso de robots como apoyo a dichas actividades espaciales, los cuales, si bien primitivos en sus inicios, han aumentado grandemente en su capacidad y calidad de operación, mejorando su diseño, desempeño, características y complejidad tecnológica para su uso en el espacio. Estos robots son conocidos como Robots Espaciales, y se dividen en dos ramas: Los Robots Humanoides de Apoyo, y los Rovers Planetarios, y ambos se mencionarán a continuación. Es importante aclarar que los robots espaciales tienen una ventaja fundamental sobre los seres humanos a los que apoyan durante sus actividades espaciales: además de las ventajas de mayor fuerza, velocidad, precisión, seguridad y economía de uso con respecto a los humanos, así como la falta de descanso, vestido y alimentación para el robot, los seres humanos requerimos de una atmósfera artificial para vivir mientras estemos fuera de la Tierra, aspecto que los robots no necesitan para poder operar correctamente. Esta ventaja extra hace que los robots espaciales sean sumamente atractivos para su operación y apoyo fuera de la Tierra, por lo que actualmente se tiene mucho interés en la Mecatrónica Espacial. La dificultad, complejidad, costo, y peligro asociado, de tener una atmósfera artificial fuera de la Tierra, se reducen grandemente al tener robots que puedan sustituir a los humanos en el espacio exterior. Los robots pueden ser diseñados para soportar la temperatura extrema, radiación, microgravedad y vacío presentes en el espacio exterior, reduciendo los riesgos para los astronautas fuera de la Tierra ya sea en la Estación Espacial Internacional (EEI) o en cohetes y cápsulas tripuladas, mediante robots humanoides de apoyo, o sustituyéndolos con rovers planetarios donde los costos, duración o riesgo de la misión así lo requiera. A continuación una breve descripción de ambos tipos de robots espaciales. Rovers Planetarios.- Un Rover Planetario es un vehículo móvil de exploración espacial diseñado para recorrer la superficie de un planeta, luna, asteroide o cualquier otro cuerpo espacial. Requieren para su operación de enlaces de radio con un control remoto semi-autónomo, y con un tiempo de retardo proporcional a su distancia de la Tierra. Los rovers se empezaron a usar en los 1960s para explorar la Luna, inicialmente, y Marte después, siendo usados tanto por la extinta Unión Soviética, hoy Rusia y países vecinos, como por los Estados Unidos a través de la NASA.
Lanzamiento: Un rover planetario forma parte del equipamiento necesario para una misión de exploración e investigación en algún otro cuerpo celeste fuera de la Tierra. Por lo general se planea una misión donde se incluya el uso de instrumentación y tecnología científica para el estudio de la atmósfera, suelo, radiación o cualquier otro parámetro que alguna agencia espacial considere importante para conocer mejor las características del cuerpo celeste. Los rovers planetarios son lanzados desde la Tierra dentro de una cápsula a control remoto mediante potentes cohetes, en trayectorias que pueden tardar días, semanas, meses o años en llegar a su destino final. Una vez que la cápsula se acerca al planeta o luna de su destino, se coloca en una órbita circular sobre su superficie, buscando el lugar apropiado para la fase de aterrizaje del segmento de tierra, mientras una parte de la cápsula se mantiene en órbita sobre el planeta o luna, para hacer el relevo de las señales de radio control remoto del rover. El segmento de tierra incluye el rover y su base de control, que aterrizan en la superficie mediante pequeños cohetes y/o paracaídas, y se despliegan para su posterior operación controlando las actividades remotas del rover. Un rover puede estudiar parámetros físicos, químicos o biológicos de la atmósfera y superficie del planeta bajo estudio, mediante una serie de instrucciones y acciones previamente programadas por la agencia espacial en la Tierra, previo al lanzamiento del rover. En todos los casos, el manejo, uso y control de rovers planetarios debe considerar un tiempo de retardo de la señal de control debido a la gran distancia entre la Tierra y el planeta en el cual se encuentre trabajando el rover, el cual se duplica al bajar la información de monitoreo en el enlace de regreso. Algunos ejemplos de rovers planetarios (fecha y su país de origen) son la serie Lunokhod 1, 2 y 3 en los 1960s (a la Luna, enviado por la URSS), el Rover Lunar Apollo (1960s y 70s (Luna, EUA) y más recientemente, los rovers Sojourner (1998), Beagle, Opportunity (2004), Curiosity (2011), todos enviados a Marte por los EUA. Finalmente, la NASA envió el pasado 6 de Septiembre de 2013 una misión robótica a la Luna, llamada LADEE (Lunar Atmosphere Dust Environment Explorer), para orbitar la Luna y enviar información sobre su atmósfera, las condiciones de la superficie, y las influencias ambientales del polvo lunar [2]. Actualmente (Septiembre de 2013) LADEE está en camino a su destino y se espera que llegue a la Luna a principios de Octubre de 2013, para entrar en órbita lunar e iniciar sus labores de exploración espacial dentro de unos meses.
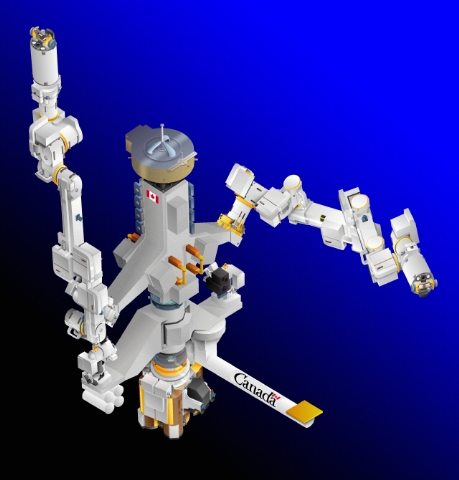
Robots Humanoides de Apoyo.- Además de los rovers planetarios, hay otro tipo de robots que tienen años colaborando con humanos en el espacio, que son similares a los robots humanoides, y se les conoce como Robots Humanoides de Apoyo. El primero de dichos robots fue un brazo manipulador desarrollado por la Agencia Espacial de Canadá, llamado “Canadarm”, para ser utilizado por el Transbordador Espacial Shuttle (Space Transport Shuttle - STS), de la NASA (EUA) desde 198x. El Canadarm apoyó las actividades extravehiculares más importantes que realizaron las tripulaciones de los diferentes transbordadores espaciales, entre ellos el ensamblado de las diversas partes de la Estación Espacial Internacional (EEI), la reparación del Telescopio Espacial Hubble, múltiples misiones de servicio y mantenimiento al STS, y las distintas caminatas espaciales de astronautas del STS durante toda su vida útil (1978-2011). Gracias a la experiencia adquirida con el Canadarm por la Agencia Espacial de Canadá, cuando se definieron las actividades y participación para la nueva Estación Espacial Internacional (EEI), Canadá propuso una nueva versión del brazo manipulador espacial, el “Canadarm 2”, en una versión más grande, más fuerte, más compleja y con más puntos de movimiento que el Canadarm 1. Además, y debido al mayor tamaño de la EEI con respecto al STS, el Canadarm 2 forma parte permanente de la EEI y se encuentra sobre un riel que recorre su cuerpo principal, para ayudar a su mantenimiento y supervisión permanente. Varios habitantes de la EEI deben saber manejar el Canadarm 2 en todo momento, para realizar cualquier tipo de actividades que así lo requieran. Finalmente la EEI tiene ahora un nuevo asistente para apoyar al Canadarm - 2, un robot humanoide que fue subido a la EEI en el último vuelo del STS en 2011, llamado “Robonauta”, y que es una creación de la empresa General Motors y la NASA, con el fin de realizar servicios de apoyo mediante un robot humanoide capaz de manipular herramienta como cualquier humano, pero con las ventajas de un robot fuera de la atmósfera. A la fecha, sólo se ha ensamblado la parte superior del Robonauta, que consta de la cabeza, brazos y manos, además del torso donde están las baterías, por lo que se ensambla mediante un acoplador mecánico a la EEI, pudiendo también ensamblarse a una cadera con piernas humanoides o el torso arriba de un vehículo rover, de ser necesario. El Robonauta es probablemente el primero de una serie de futuros robots humanoides espaciales que se conviertan en verdaderos asistentes de apoyo para los astronautas, habitantes y visitantes de vehículos espaciales en misiones orbitales y planetarias del futuro. Por su parte, JAXA, la agencia espacial del Japón, acaba de lanzar a la EEI su primer robot astronauta, “Kirobo”, el 4 Agosto de 2013 [3].

Kirobo es un robot humanoide de 34 cm de altura y 1 kg de peso, diseñado para asistir a astronautas en gravedad cero, con capacidad de reconocimiento de palabras y comandos de voz (en Japonés). Kirobo tuvo el honor de ser el primer robot en hablar desde el espacio el pasado 5 de Septiembre de 2013, cuando hizo su primer el primer saludo audible, diciendo “Buenos días a todos en la Tierra. Soy Kirobo. Soy el primer robot astronauta. Gusto en conocerlos”. Kirobo, que fue creado por Toyota, la Universidad de Tokio y otras dos empresas japonesas, celebró la elección de Tokio para las olimpiadas de 2020, y está programado para grabar todas las conversaciones que lleve a cabo con la tripulación japonesa de la EEI, buscando estudiar la interacción de robots con seres humanos para darles soporte emocional en situaciones de aislamiento sobre periodos largos de tiempo.Robots espaciales del Futuro
El área de la Ingeniería Robótica y Mecatrónica ha tenido un crecimiento explosivo a partir del año 2000 en adelante, tanto en México, como en el mundo. A la fecha los países con mayo avance en estas áreas son Japón principalmente, seguido de cerca por los Estados Unidos y la Comunidad Europea, así como China y Corea del Sur. En estos países es cada vez mayor la integración y uso de robots en la vida diaria de su sociedad, inicialmente en el sector industrial, aunque incrementalmente en el militar, educativo y sobre todo, en el social.
Con respecto a la robótica en el sector espacial, en las actualidad (2013), las agencias espaciales de los Estados Unidos, (NASA), de Europa (ESA), de la India (ISRO) y Rusia (RKA), así como de China (CNSA), están trabajando en el diseño e implementación de futuras misiones robóticas espaciales, tanto a la Luna como a Marte, basadas principalmente el uso de Rovers lunares y planetarios y, en menor escala, en el uso de robots humanoides, planeados para entrar en operación entre 2015 y 2025.

Robótica y Mecatrónica en México
Es importante que México forme parte de las naciones que realizan actividades en el estudio, desarrollo e innovación de Tecnología Robótica y Mecatrónica orientada al espacio. Para lograr esto, es necesario formar grupos de trabajo en el área de robótica y mecatrónica, de los cuales hay varios en el país, pero con conocimientos de tecnología, aplicaciones y medio ambiente espacial, de los cuales hay muy pocos en el mundo. En la actualidad existen numerosas instituciones académicas y de educación superior en México que ofrecen programas de estudios, capacitación y posgrado en robótica y mecatrónica, principalmente en la UNAM, el IPN, el CINVESTAV, la UAM o el CICESE. Además, la gran mayoría de las universidades autónomas estatales y los institutos tecnológicos regionales, tienen grupos de trabajo, de investigación y posgrado en estas áreas, aunque sólo en la UNAM (Institutos de Ingeniería y de Geofísica-CU, Instituto de Ingeniería-Querétaro) y en el CICESE-Ensenada, se está trabajando en los inicios de lo que será la robótica y mecatrónica espacial mexicana. Sin embargo, es necesario crear más grupos de trabajo y de investigación en estas áreas, que es también del interés de la Agencia Espacial Mexicana. Es importante que dentro de las futuras generaciones de científicos y tecnólogos mexicanos, se cuente con cada vez más personas trabajando en el área de robots espaciales, colaborando con profesionistas, grupos y agencias espaciales de México y de otros países.