En esta ocasión, vamos a tratar un tema muy importante a la hora de construir un robot, y es el cómo hacer que nuestro robot tenga la capacidad de percibir el medio que lo rodea.
Los seres humanos estamos dotados de sentidos, con los cuales podemos ver, oír, oler, toca objetos y sentirlos, además de poder sentir los sabores.
Los robots por si mismos no tienen esta capacidad, pero dependiendo del objetivo del nuestro, podemos equiparlo con uno o más de estos sentidos a partir de componentes electrónicos que recojan la información de su entorno y la entreguen al cerebro de nuestro robot.
La información recogida por los elementos sensores (también llamados “captores”), se puede presentar en dos tipos de señales: Analógica o Digital. Una gran cantidad de la información de la vida diaria se describe en forma de números. Por Ejemplo: “Son las 2:00 en punto”; “La temperatura exterior es 21°C”; “El auto está viajando a 45Km/hr”, etc. Este es el caso del “mundo digital”. Sin embargo, existe también el “mundo analógico”, donde la información está dada en forma de una analogía, donde utilizamos algo que se entienda de forma similar, por ejemplo:



El reloj de arena de una hora:En este caso, cuanto mayor sea el intervalo de tiempo, mayor será la cantidad de arena en el fondo de nuestro reloj de arena.
En el termómetro de mercurio, entre más calor detecte, el mercurio de desplaza más sobre el tubo.
En el medidor de velocidad de un vehículo, entre mayor sea la velocidad del vehículo, más se moverá el puntero a la derecha.
El problema en este caso, es que se debe realizar un esfuerzo para extraer los datos; en el caso del termómetro y el medidor de velocidad, se debe calcular dónde se encuentra el puntero en la escala.
Entonces, ¿cómo obtener la información, ya sea analógica o digital, del medio que rodea a nuestro robot?, bien, empecemos por identificar los sensores que podríamos utilizar en nuestro robot.
Como ya mencionamos antes, un robot no entiende nada de lo que sucede en el mundo a su alrededor mientras no lo dotemos de sentidos, además, debemos recordar que el “lenguaje” que entiende es el de voltajes y corrientes.
Un sensor tiene que convertir los cambios en el mundo exterior en señales eléctricas, mismas que puede cambiar de valor en el transcurso del tiempo; por ejemplo, el nivel de luz, la temperatura, la presión o la humedad.
Un sensor digital, es aquél que nos entrega dos estados en su salida, de tal forma que puede ser de valor 1 (on) o de valor 0 (off). Los sensores digitales mayormente utilizados (pero no los únicos), son los Switch. Un switch puede ser utilizado para:
a) Inicializar una secuencia de eventos, tal como un display de luces.
b) Iniciar y después detener un programa.
c) Enviar pulsos de entrada a u sistema de control, como un contador por ejemplo.
d) Para disparar una alarma cuando una puerta o ventana haya sido abierta.
Los Switch son fabricados en diversas formas, veamos algunos de ellos:





- Acción momentánea (Push switch). Por ejemplo, el switch de un timbre, el cual causa que suene el timbre solo cuando es pulsado.
- Interruptor de palanca. Este es un tipo de interruptor con enclavamiento, por ejemplo, el apagador de una lámpara, el cual la enciende la primera vez que es presionado, y la apaga la siguiente vez que se presiona.
- Interruptor de inclinación. Este interruptor se acciona cuando se inclina a un determinado ángulo.
- Interruptor de llave. Por ejemplo, el utilizado en el encendido de un vehículo, el cual solo opera con la llave correcta.
- Interruptor magnético. Este Interruptor se activa ante la presencia de un campo magnético cercano a él, y se desactiva si el campo magnético desaparece.
¿Y los sensores analógicos?, un sensor analógico, debe convertir los cambios en el mundo real, tales como intensidad de la luz, temperatura, presión, humedad, sonido, etc., en señales eléctricas, de tal forma que se requiere de un diferente tipo de sensor para cada tarea.

- Sensor de luz. Se trata de un resistor dependiente de la luz (LDR). Su resistencia cae cuando se hace incidir luz sobre su superficie fotosensible, y aumenta ante la falta de luz. Hay que aclarar que puede ser muy lento al reaccionar ante los cambios de luz.
- Fotodiodo. Se trata de un semiconductor que solo permite el paso de una corriente a través de él, cuando la luz es suficiente para excitar su superficie fotosensible. Este responde mucho más rápido a los cambios de luz que la LDR.
- Sensor de temperatura. Se trata de un Termistor. Existen dos diferentes versiones del termistor. Uno de estos se denomina NTC (coeficiente negativo de temperatura), el cual tiene una resistencia eléctrica que comienza a descender cuando aumenta la temperatura. El otro tipo es el PTC (coeficiente positivo de temperatura), el cual aumenta su resistencia al aumento de la temperatura.
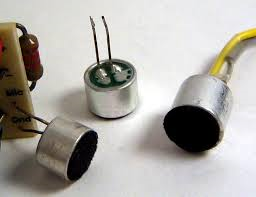
- Sensor de sonido. Se trata de un micrófono. De forma común, un micrófono genera un cierto nivel de tensión cuando detecta un sonido, entre mayor es el sonido, mayor es el voltaje.
Hasta ahora hemos visto que los sensores, como por ejemplo la LDR y el termistor, producen un cambio en su resistencia cuando las condiciones en el mundo exterior cambian.
Ahora necesitamos convertir ese cambio en la resistencia del sensor, en un cambio de tensión o corriente, con la finalidad de que un sistema electrónico de control lo comprenda. Utilizar un divisor de tensión es una forma de realizar esto. Este consiste en dos resistores conectados en serie (uno en seguida del otro), de tal forma que se reparten el voltajes suministrado por la fuente entre los dos. El siguiente es un diagrama de circuito para un sensor de temperatura:
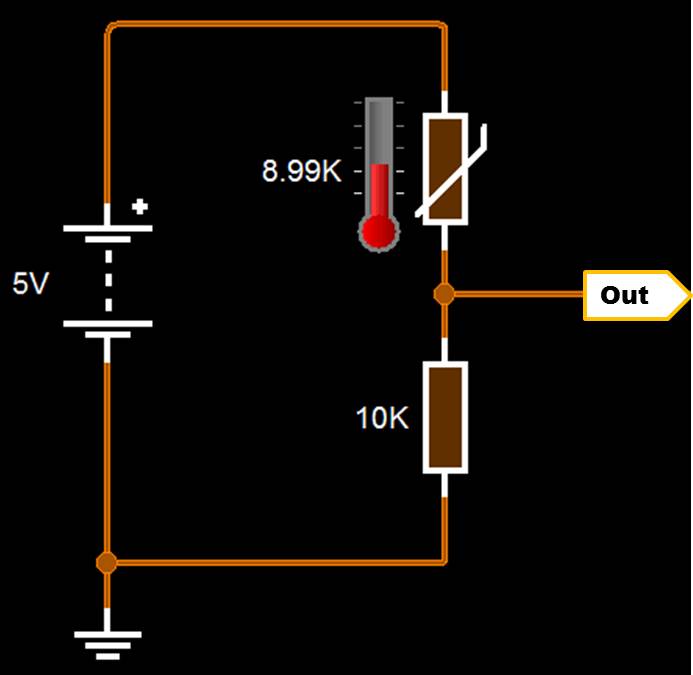
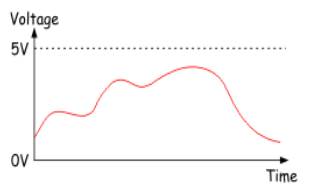
El voltaje en la salida se incrementa cuando la temperatura se incrementa. Esta es una señal analógica porque el voltaje “copia” el comportamiento de la temperatura. La señal analógica puede tener cualquier valor de voltaje, limitado solamente por la fuente de voltaje utilizada. En este caso, la salida de voltaje del sensor de temperatura podría, en teoría, llegar tan alto como 5 volts, o tan bajo como 0 volts, con muchísimas lecturas intermedias. Después de un cierto periodo de tiempo, la salida de voltaje podría variar de la siguiente forma:
Una señal digital, en cambio, lleva la información en forma de número. Los sistemas electrónicos utilizan el sistema de números binarios, el cual utiliza solamente los números 0 y 1. Estos dos números son codificados como voltajes. Podríamos suponer entonces que: 0= voltaje bajo, 1= voltaje alto.
Las señales digitales entonces, tienen dos posibles niveles de voltaje solamente. Estos son, usualmente, el valor de la fuente de voltaje o tan cerca como sea posible ese valor y 0 volts.
¿Cómo podemos meter estos números en un sistema electrónico?, una manera (muy lenta), seria utilizando un interruptor (este es un ejemplo de sensor digital); miremos el siguiente diagrama:
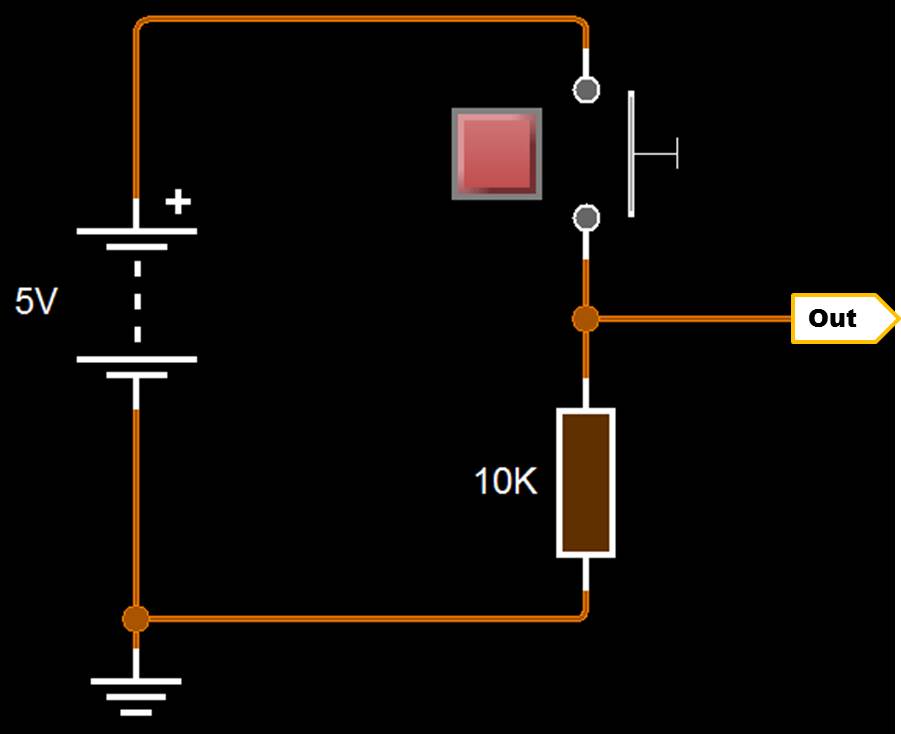
Cuando el interruptor está abierto (no presionado), la salida es “empujada” hacia abajo por el resistor a 0 Volts. Esta salida representaría la salida 0. Cuando el switch es cerrado (presionado), la salida es conectada a la terminal positiva, la cual, en este caso tiene 5 volts. Esta salida representaría el número 1. (Nótese que se pueden intercambiar las posiciones del switch y el resistor en el circuito anterior, lo cual tendría por resultado que al oprimir el switch pondríamos la salida a 0). El siguiente diagrama muestra una señal digital más compleja:
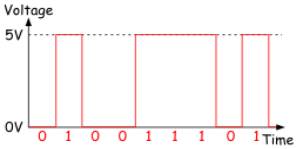
El número binario representado por la señal, está dado bajo la forma de onda. Muy bien, ahora ya sabemos un poco más de los sensores utilizados en robótica. Por supuesto existen muchos más, pero esta información es la básica para iniciarnos en este interesante mundo del control de robots. En la próxima entrega, trabajaremos en la comprobación de operación de varios tipos de sensores de forma práctica y la conversión de señales analógicas a digitales, así que tengan preparados sus protoboards!.