A continuación, vamos a evaluar un sencillo sensor táctil que nos podría servir para saber si nuestro robot ha chocado con algún objeto, generando una señal eléctrica que servirá como indicador de esa condición.
Primero, recordemos lo tratado en “Hacia el Espacio” del mes de marzo, donde abordamos las generalidades sobre sensores y en donde conocimos acerca de los sensores digitales.
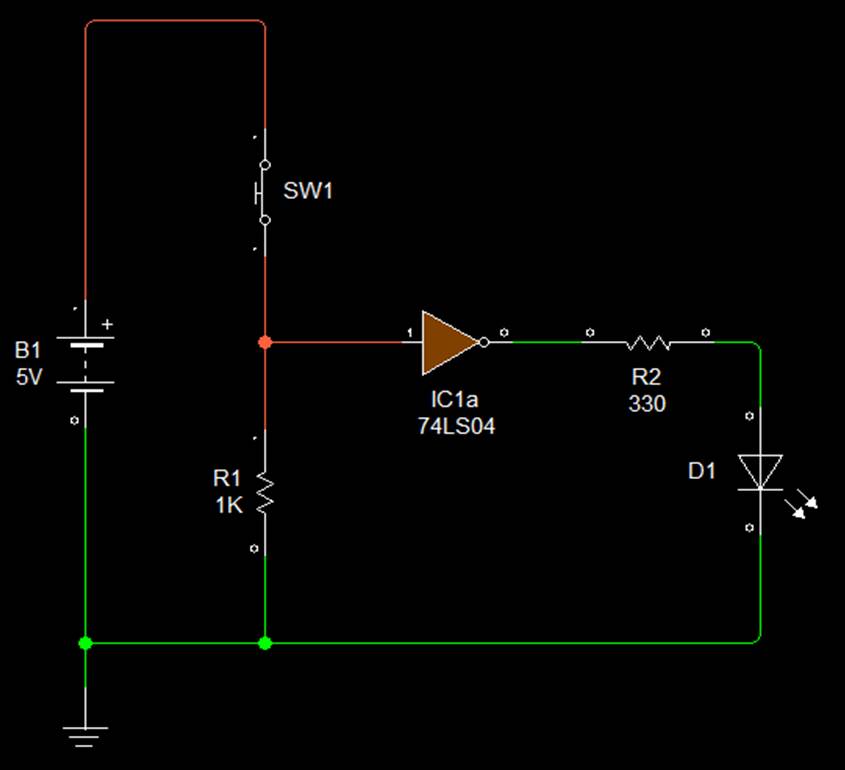
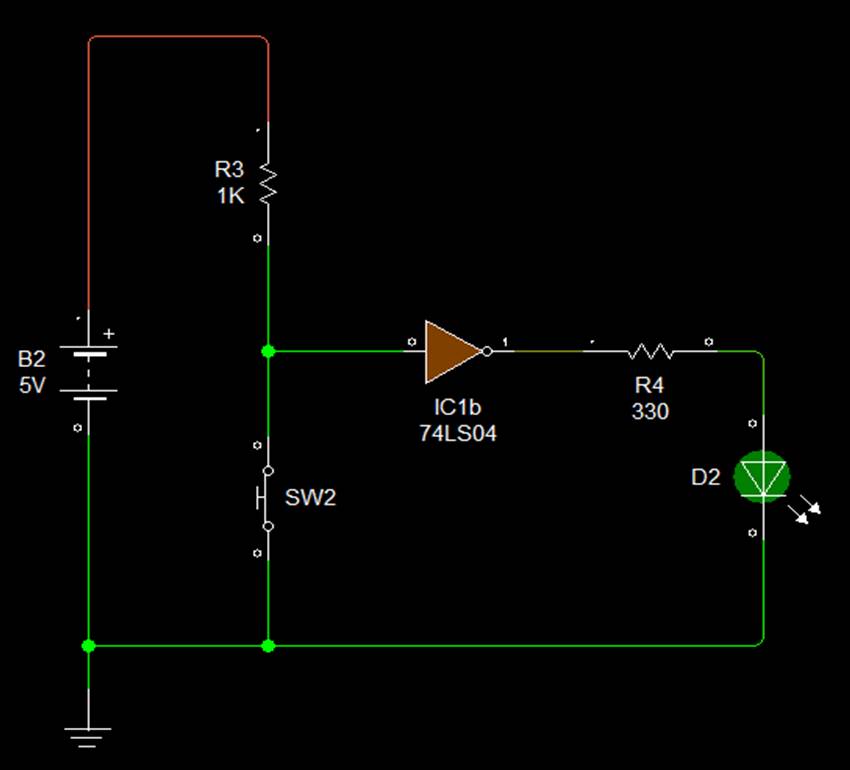
Para nuestro módulo sensor táctil, utilizaremos una combinación de botón pulsador con resistencias de “pull-down” y resistencias de “pull-up”, como se muestra en la siguiente imagen:
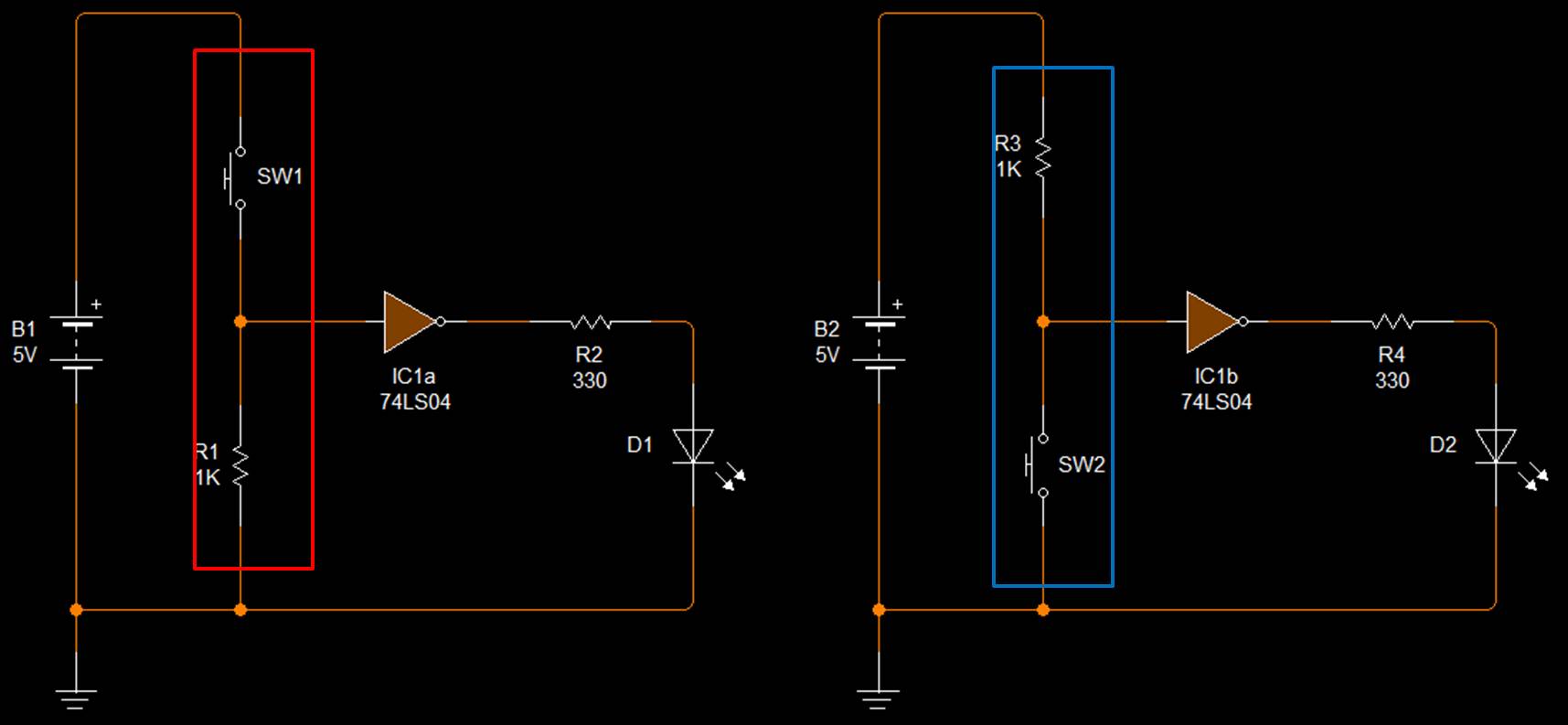
En el diagrama del lado izquierdo, podemos ver dentro del marco rojo, la combinación de botón pulsador con resistor de “pull-down”, y del lado izquierdo veremos el mismo diagrama pero con la combinación de botón pulsador y resistor de “pull-up”.
¿Y para qué sirve tener dos formas de conectar nuestro módulo sensor táctil?. Podemos decir que para cada caso, la “salida” del módulo es diferente, en uno puede estar siempre a un nivel alto (1 lógico), y en el otro a un nivel bajo (0 lógico), que no cambiaran mientras no se pulsen los botones respectivos.
Vamos con calma, empecemos por dar la lista de los materiales para esta práctica:
01 Protoboard grande.
01 Broche para pila 9V.
01 Pila “cuadrada” de 9V.
01 Regulador de tensión LM7805
01 Circuito integrado 74LS04.
02 Botón pulsador (“Botón de Push”)
02 Resistor de 1 Kilo Ohm (Marrón, Negro, Rojo, Oro).
02 Resistor de 330 Ohms (Naranja, Naranja, Marrón, Oro).
02 Led de 5mm (cualquier color).
01 Metro de alambre estañado calibre 22 AWG negro.
01 Metro de alambre estañado calibre 22 AWG rojo.
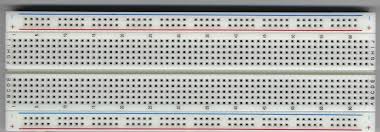
Recordemos rápidamente el aspecto de nuestro protoboard:
De la misma forma, aclaremos con esta imagen el botón pulsador que vamos a utilizar, ya que los hay de muchos tipos:

El broche para conectar nuestra pila de 9V y nuestra pila:


En cuanto a las resistencias o resistores, recordemos verificar los colores para asegurar que son del valor que requerimos, en la lista de materiales podemos obtener el código de color:

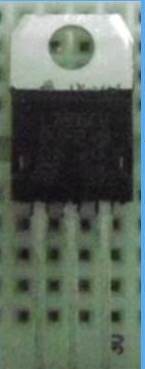
Referente a los Led, pueden servir los de 5mm en tu color favorito; de la misma forma, identifica el regulador de tensión, que debe tener escrito en el cuerpo plástico la codificación LM7805:

En cuanto al circuito integrado 74LS04, debemos decir que se trata de una “Compuerta Lógica con Negación”, esto quiere decir básicamente que mientras la entrada de esta compuerta tenga un valor lógico Bajo (0 lógico), la salida será la “negación” de la misma, por lo que tendrá un valor Alto (1 lógico).
Por el contrario, mientras tenga un valor Alto en la entrada (1 lógico), la salida tendrá un valor Bajo (0 lógico), ya que como lo dijimos, la salida es la negación de la entrada.
Ahora te presentamos si simbología en el diagrama siguiente, para que puedas identificar todas sus terminales:
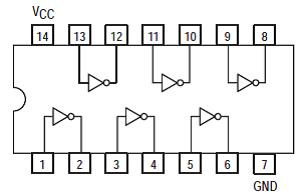
Como puedes observar, este circuito integrado está formado por seis diferentes “Compuertas NOT”, (negadoras): la base del triángulo en el símbolo es la entrada, y el círculo en la punta del triángulo es la salida. La patilla No. 7 es la terminal de tierra, mientras que la patilla No. 14 es la terminal positiva.
Es importante aclarar que se hace necesario tener el máximo cuidado de solo conectar este integrado a una tensión de 5 Volts, ya que tensiones superiores lo dañarán irremediablemente.
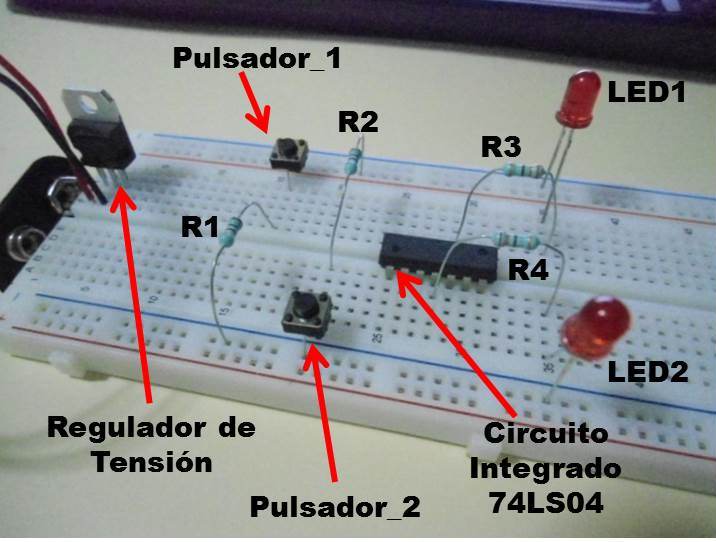
Ya identificados nuestros componentes, vamos a realizar el montaje de éstos en el protoboard de la siguiente manera:
Regulador de tensión: La patilla 1 se conecta al nodo H1, patilla 2 al nodo H2 y patilla 3 al nodo H3.
Broche porta pila: Hilo rojo al nodo F1, hilo negro al nodo F2.
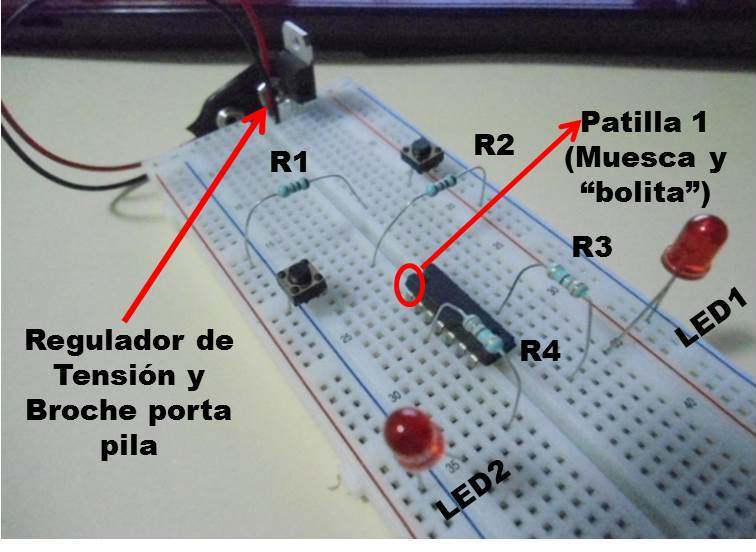
Circuito Integrado 74LS04: La patilla 1 debe quedar conectada al nodo E25, de tal forma que la patilla 14 quede conectada al nodo F25.
Pulsador_1: Nodo J16 y a positivo.
Pulsador_2: Nodo A21 y a negativo.
Resistores: R1 al nodo F16 y a negativo; R2 al nodo E21 y al positivo; R3 al nodo G29 y G35; R4 al nodo D28 y D35.
Led_1: al nodo J35 y a negativo; Led_2: al nodo A35 y al negativo.
No olvides interconectar las barras de alimentación: azul con azul, rojo con rojo, mediante puentes de alambre calibre 22 AWG.
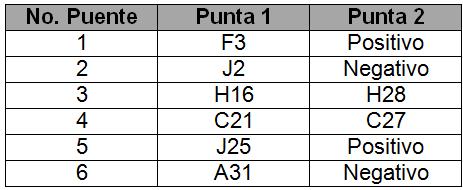
Ahora vamos a colocar los puentes de alambre en los nodos como indica la tabla:
Ya que estén todos los componentes en su lugar y los puentes conectados, te sugerimos revisar nuevamente los nodos de conexión y las conexiones de estos puentes, con la finalidad de encontrar posibles errores para corregirlos antes de energizar el circuito.
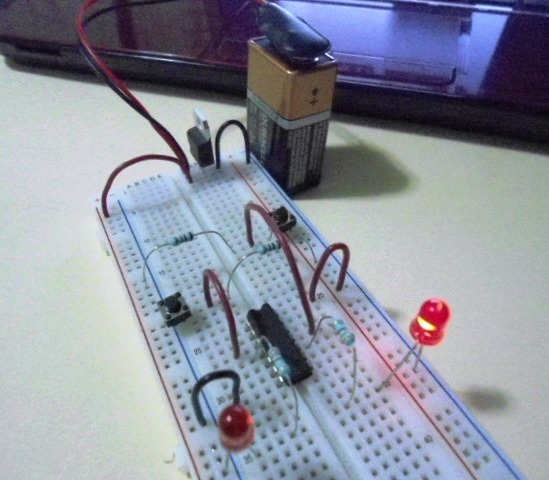
Si ya realizaste esta última revisión, ahora sí!, conecta tu pila en el broche, y si todo va bien, podrás observar el Led 1 encendido, y el Led 2 permanecerá apagado. Aquí te mostramos como se ve ya cableado:
Lo siguiente es realizar la comprobación de la operación de nuestros módulo sensor de choque; pulsa el botón 1 y observa lo que sucede con el Led 1; pulsa el botón 2 y observa lo que sucede con el Led 2.
El Led 1 se apaga debido al cambio del nivel lógico en la entrada de la compuerta negadora, mientras que el Led 2 se enciende, negando el valor lógico Bajo de su respectiva entrada.
Excelente trabajo!, en la siguiente entrega comenzaremos a trabajar con sensores analógicos, de tal forma que estas pequeñas prácticas te permitan ir adaptando sensores al robot móvil que montamos en “Hacia el Espacio” del mes de noviembre del 2013.
Te recordamos visitar www.alldatasheet.com para descargar las hojas de datos de los componentes que utilizamos para conocer más sobre su funcionamiento.
Para cualquier duda o comentario, no dudes en contactarnos.
P.T. Israel Téllez González
elprofe_tellez@hotmail.com