Cuando trabajamos con robots móviles, siempre nos enfrentamos al hecho de que no es posible mantener todo el tiempo una misma dirección de movimiento, sino que constantemente debemos realizar cambios en la dirección y hacer uso de la marcha atrás.
Es entonces necesario contar con un control que permita realizar este cambio para que nuestros motores eléctricos giren en uno u otro sentido. En los motores de corriente directa basta con intercambiar las conexiones en los bornes para cambiar el sentido de giro del motor, pero esto no lo podemos realizar de forma manual debido que nuestro robot está en movimiento, debe de existir una etapa dentro del circuito electrónico que de forma automática haga este cambio en el sentido de giro de los motores.
Por ello, para esta entrega de Hazlo Tú Mismo, te presentamos un sencillo controlador llamado “Puente H”, elaborado a partir de transistores, que te servirá para controlar pequeños motores de tus robots.
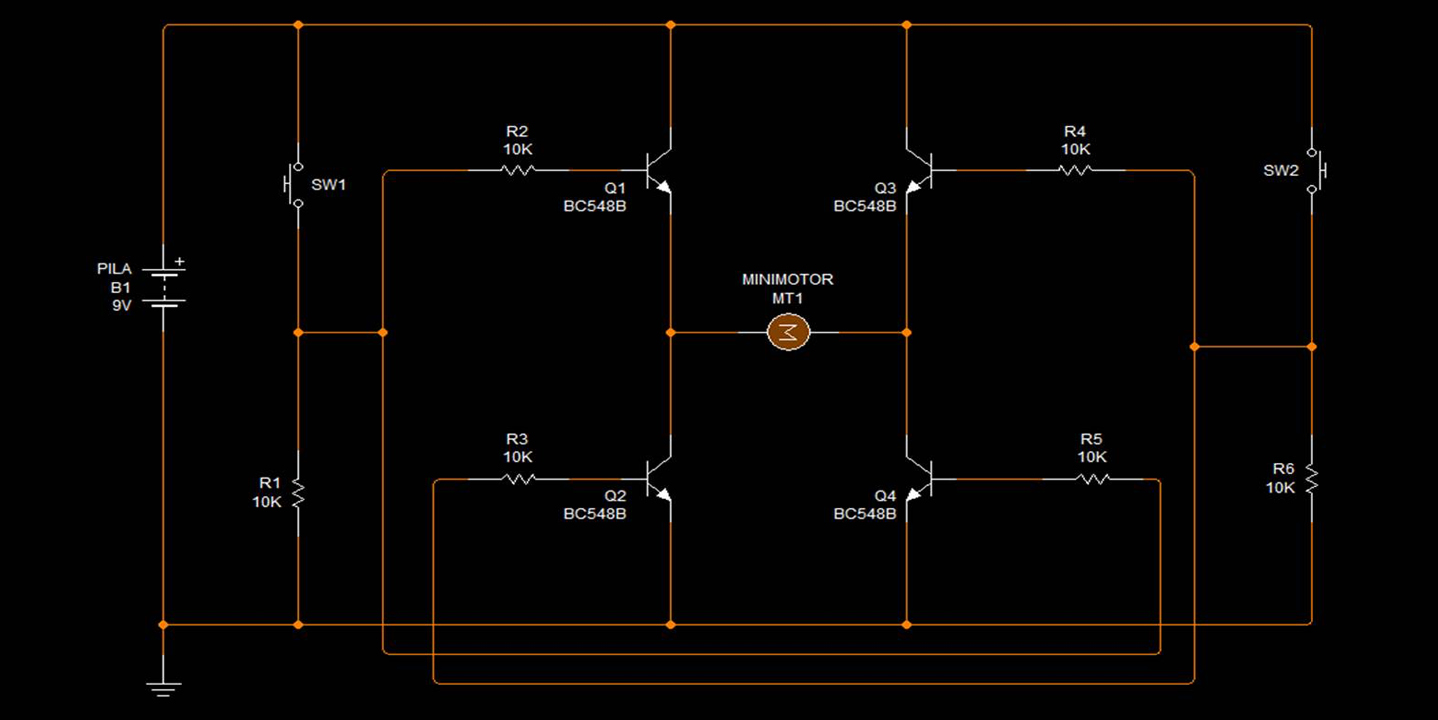
Todo el circuito se basa en la conmutación de transistores del tipo NPN, modelo BC548, con los cuáles podrás controlar pequeños motores de hasta 100 mili Amperes.
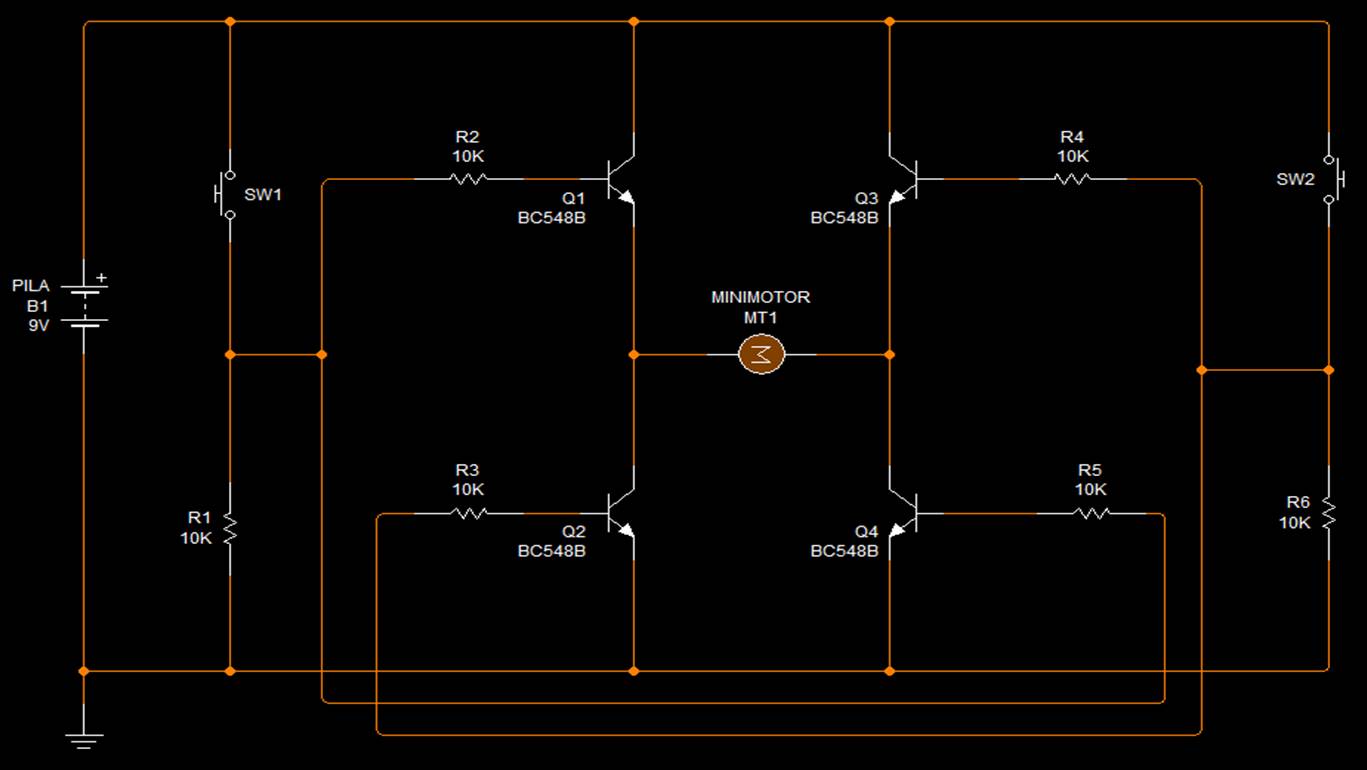
En el circuito podemos apreciar los 4 transistores (Q1, Q2, Q3 y Q4), montados precisamente de forma que parecen formar una “H” con el motor conectado al centro, (de ahí su nombre).
Los botones pulsadores SW1 y SW2 tienen la misión de controlar en qué momento se pone en marcha el motor, a partir de enviar una señal de corriente a la parte central de transistor (conocida como base), dependiendo de qué pulsador se accione, el motor girará en uno o en otro sentido.
La lista de materiales es la siguiente:
01 Protoboard grande.
01 Broche para pila 9V.
01 Pila “cuadrada” de 9V.
04 Transistor NPN BC548.
04 Diodo 1N4007.
06 Resistor de 10 Kilo Ohm, ½ Watt, (Marrón, negro, naranja, oro).
02 Botón “de Push”, para protoboard.
01 Mini motor de corriente directa de 3 a 9 volts.
01 Metro de alambre estañado calibre 22 AWG negro.
01 Metro de alambre estañado calibre 22 AWG rojo.
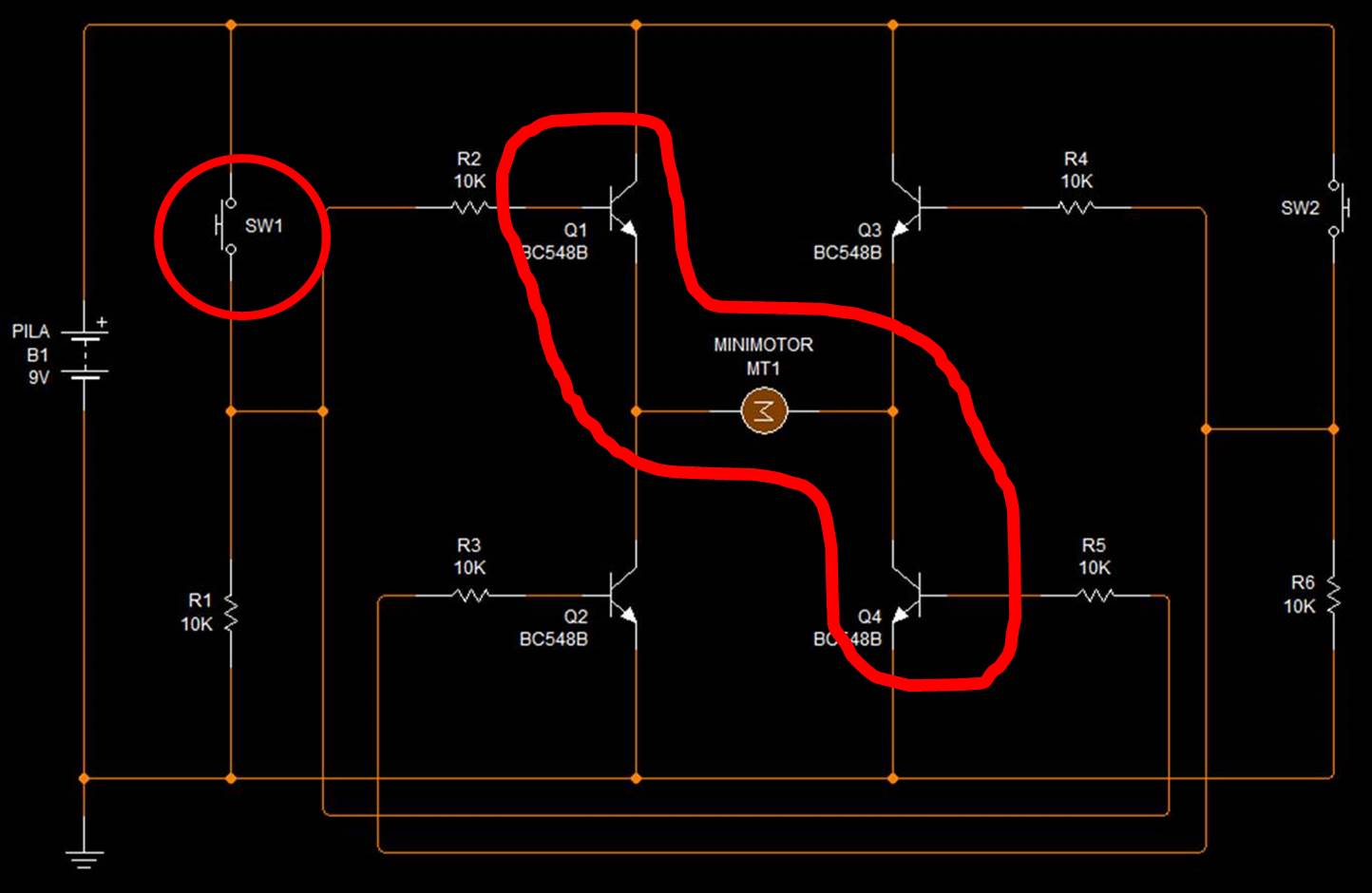
El funcionamiento del motor se logra una vez que se oprime el SW1, mismo que controla la polarización de los transistores Q1 y Q4, tal como se ve en la figura:
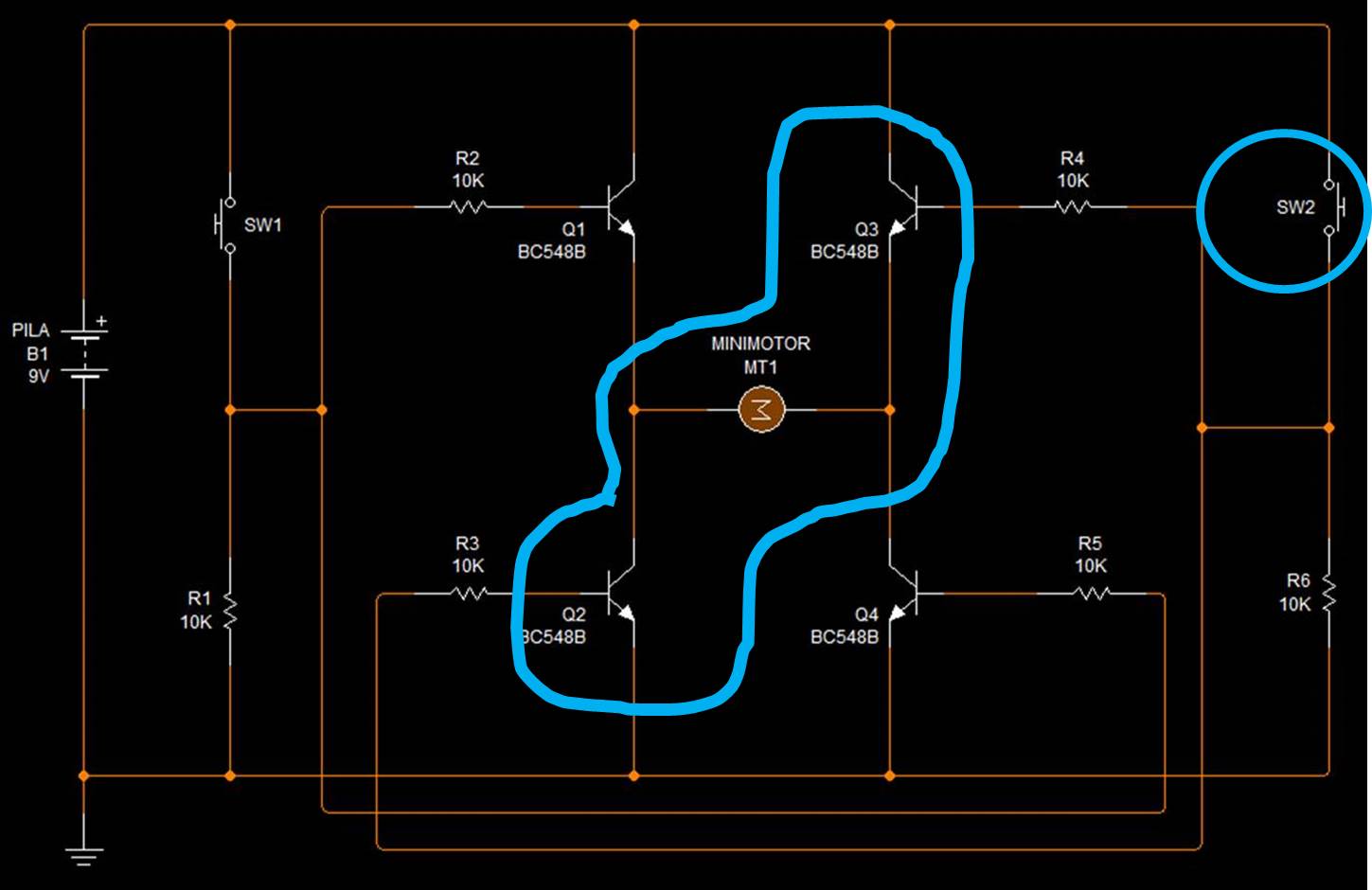
Si por el contrario se oprime el SW2, se logra la polarización de los transistores Q2 y Q3, lo que hace girar el motor en el sentido contrario:
Ahora pensemos en la forma en que se activa y desactiva el motor, dependiendo de la posición en que se encuentren los pulsadores SW1 y SW2:
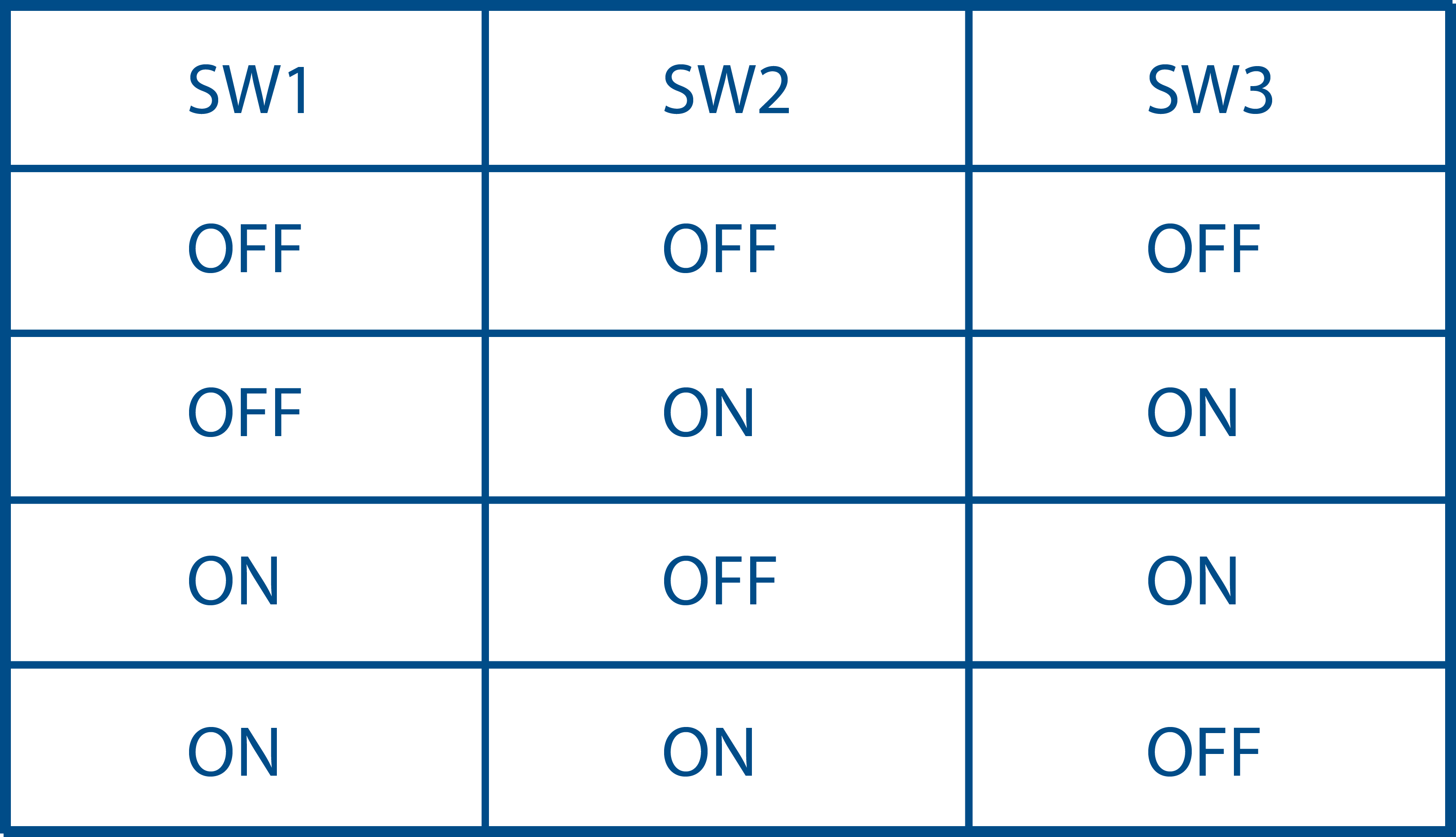
Es importante en este punto aclarar que si bien, cuando SW1 y SW2 están ambos en OFF o en ON, el motor está en OFF, ambas condiciones son diferentes en el efecto logrado en el motor, en el primer caso el eje del motor se encuentra “libre” y en el segundo caso el eje del motor se encuentra “frenado”, así que si queremos frenar nuestro robot, mandaríamos los dos pulsadores al mismo tiempo a ON, ya que de enviarlos a OFF, el robot podría seguir moviéndose debido a la inercia aún con los motores desactivados.
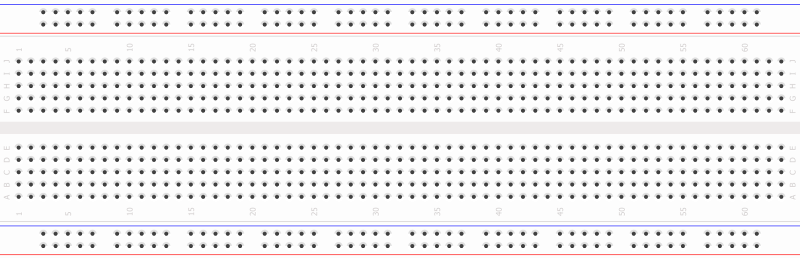
Habiendo hecho estas aclaraciones, pasemos a recordar rápidamente el aspecto de nuestro protoboard
El broche para conectar nuestra pila de 9V y nuestra pila
En cuanto a las resistencias o resistores, recordemos verificar los colores para asegurar que son del valor que requerimos, en la lista de materiales podemos obtener el código de color
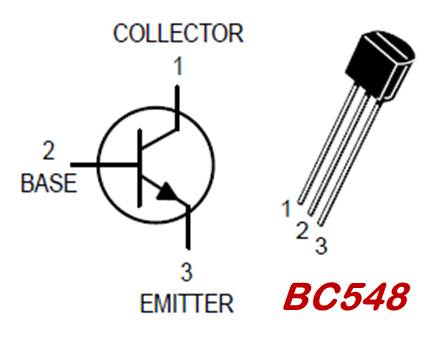
Nuestros transistores BC548, son un tipo de transistor llamado bipolar de tres capas (NPN), y cuentan con tres terminales de conexión que son colector-base-emisor, y se puede utilizar como un amplificador o bien como un switch
Los botones pulsadores procuremos obtenerlos como se ilsutran acontinuación.




Y en cuanto al mini motor de corriente directa, para hacer las pruebas nos puede servir cualquier motor de algún juguete, recuerda que deberá ser alguno que funcione entre los 3 a los 9 volts y que no consuma mucha corriente, ya que los transistores solo pueden manejar hasta 100 milésimas de Ampere. Si tu motor no arranca y haz seguido todos los pasos, seguramente es porque necesita mayor corriente, prueba cambiarlo por otro más pequeño y seguramente funcionará.

Ya identificados nuestros componentes, vamos a realizar el montaje de éstos en el protoboard de la siguiente manera:
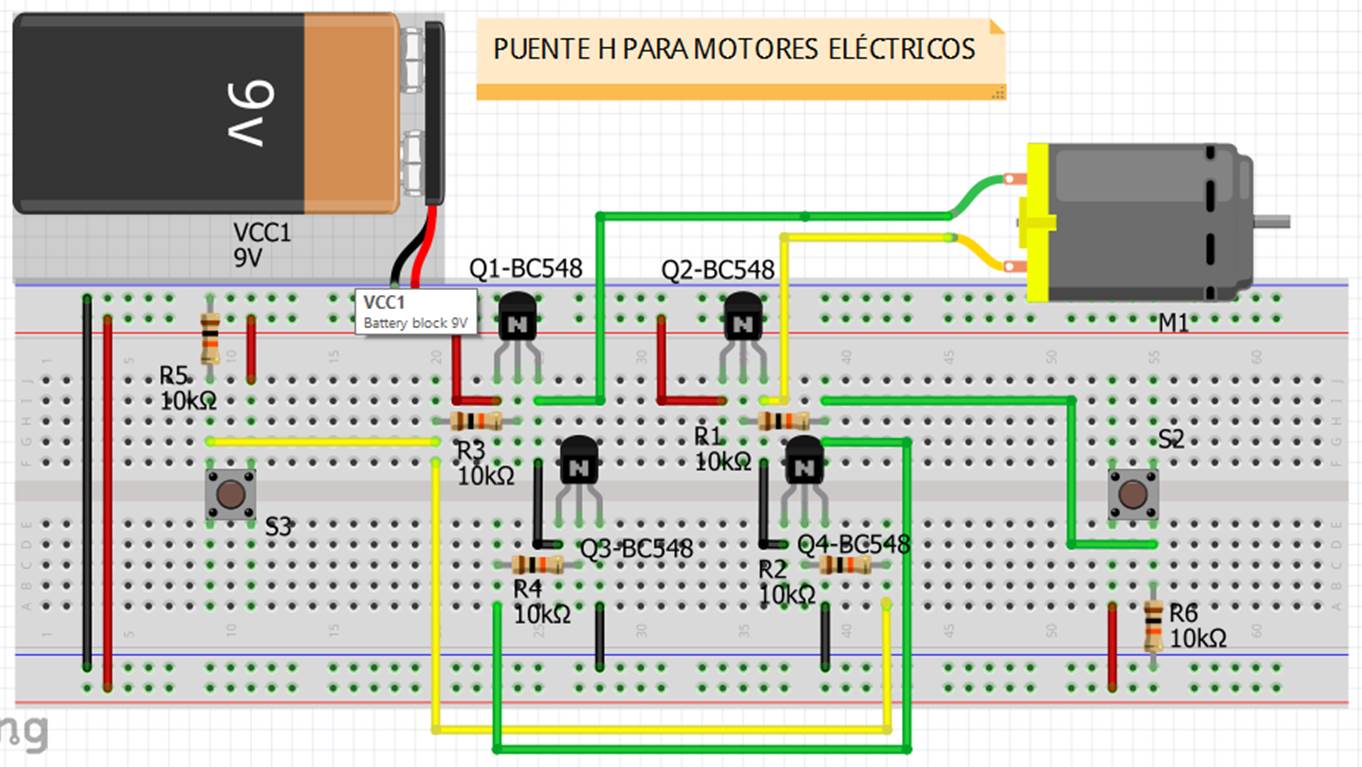
Ya que estén todos los componentes en su lugar y los puentes conectados, te sugerimos revisar nuevamente los nodos de conexión y las conexiones de estos puentes, con la finalidad de encontrar posibles errores para corregirlos antes de energizar el circuito.
Si todo va bien podrás controlar el sentido de giro del motor al pulsar uno u otro botón
Ahora, no todo termina aquí, hay un pequeño reto para ti, ya que falta un elemento en esto:
el diodo de protección (1N4007), que deberás instalar de acuerdo al siguiente diagrama:
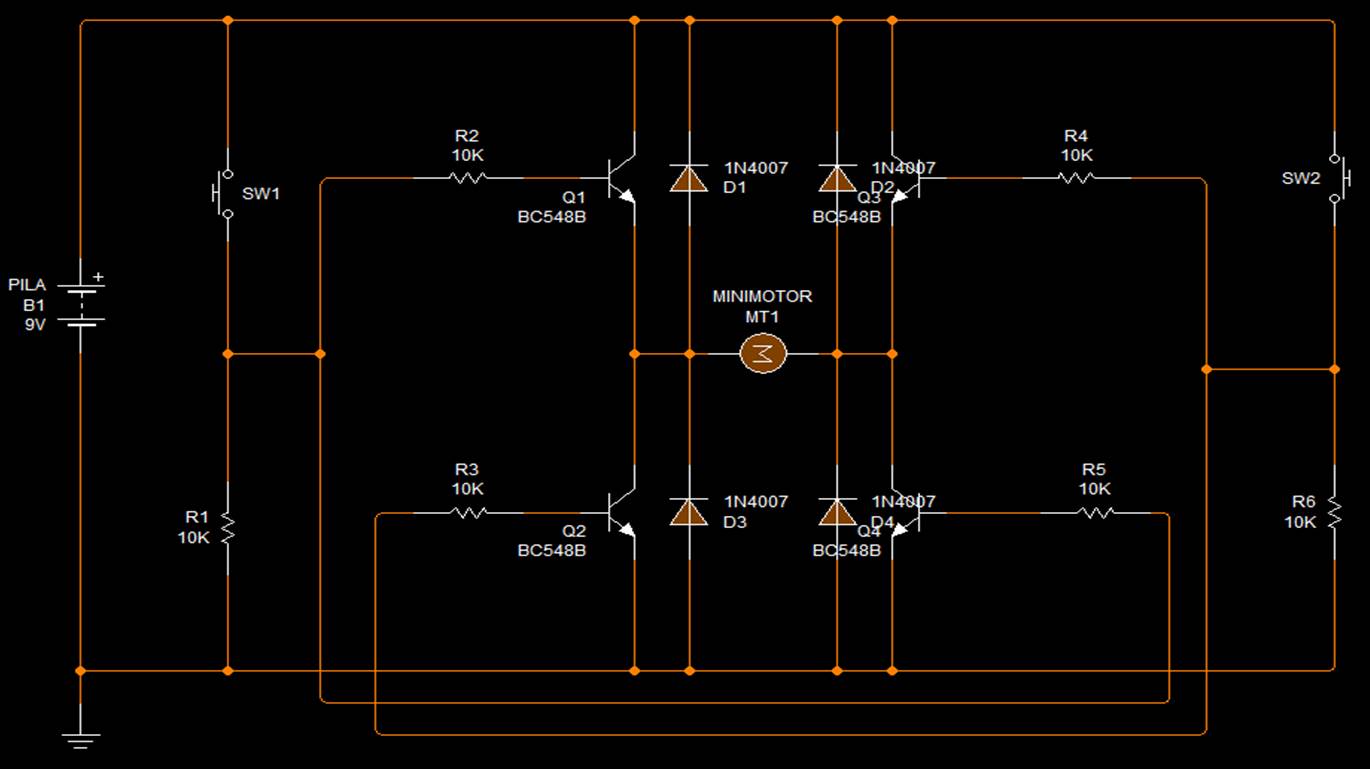
Los diodos D1, D2, D3 y D4 sirven para proteger a los transistores contra las sobretensiones debidas a la inercia de los motores cuando son desactivados, ya que por un pequeño instante de tiempo, se comportan como un generador, “inyectando” energía eléctrica en sentido inverso al circuito.
Recuerda que SW1 y SW2 pueden cambiarse por cualquiera de los sensores que hemos mencionado en esta misma sección.
¡Excelente!, ahora puedes adaptar este puente H al robot móvil que montamos en “Hacia el Espacio” del mes de noviembre de 2013.
Te recordamos visitar www.alldatasheet.com para descargar las hojas de datos de los componentes que utilizamos para conocer más sobre su funcionamiento.
Para cualquier duda o comentario, no dudes en contactarnos.
Israel Téllez González
elprofe_tellez@hotmail.com
Recuerda que SW1 y SW2 pueden cambiarse por cualquiera de los sensores que hemos mencionado en esta misma sección.
¡Excelente!, ahora puedes adaptar este puente H al robot móvil que montamos en “Hacia el Espacio” del mes de noviembre de 2013.
Te recordamos visitar www.alldatasheet.com para descargar las hojas de datos de los componentes que utilizamos para conocer más sobre su funcionamiento.
Para cualquier duda o comentario, no dudes en contactarnos.
Israel Téllez González
elprofe_tellez@hotmail.com