En esta ocasión vamos a montar un sensor que nos permitirá detectar obstáculos mediante la reflexión de la luz, de tal forma que podremos colocarlo en nuestro robot móvil, dotándolo del sentido de la vista.
El sensor está basado en el uso de un emisor de luz infrarroja (LED), y un receptor sensible a la luz infrarroja, que puede ser un fototransistor o bien un fotodiodo.
El circuito incluye un amplificador operacional en modo comparador con la finalidad de controlar el umbral del disparo de la salida.
La lista de materiales es la siguiente:
01 Protoboard grande.
01 Broche para pila 9V.
01 Pila “cuadrada” de 9V.
01 Led infrarrojo 5mm IR383 para larga distancia.
01 Led 5mm, cualquier color.
01 Fototransistor 5mm con filtro de luz de día, PT1302B/C2.
01 Amplificador operacional LM358.
01 Resistor de 100 Kilo Ohms (Marrón, negro, amarillo, oro).
02 Resistor de 330 Ohms (Naranja, naranja, marrón, oro).
01 Preset horizontal de 10 Kilo Ohms.
01 Metro de alambre estañado calibre 22 AWG negro.
01 Metro de alambre estañado calibre 22 AWG rojo.
A nuestros nuevos lectores les recomendamos consultar lo tratado en “Hacia el Espacio” del mes de marzo, donde abordamos las generalidades sobre sensores y en donde conocimos acerca de los sensores analógicos.
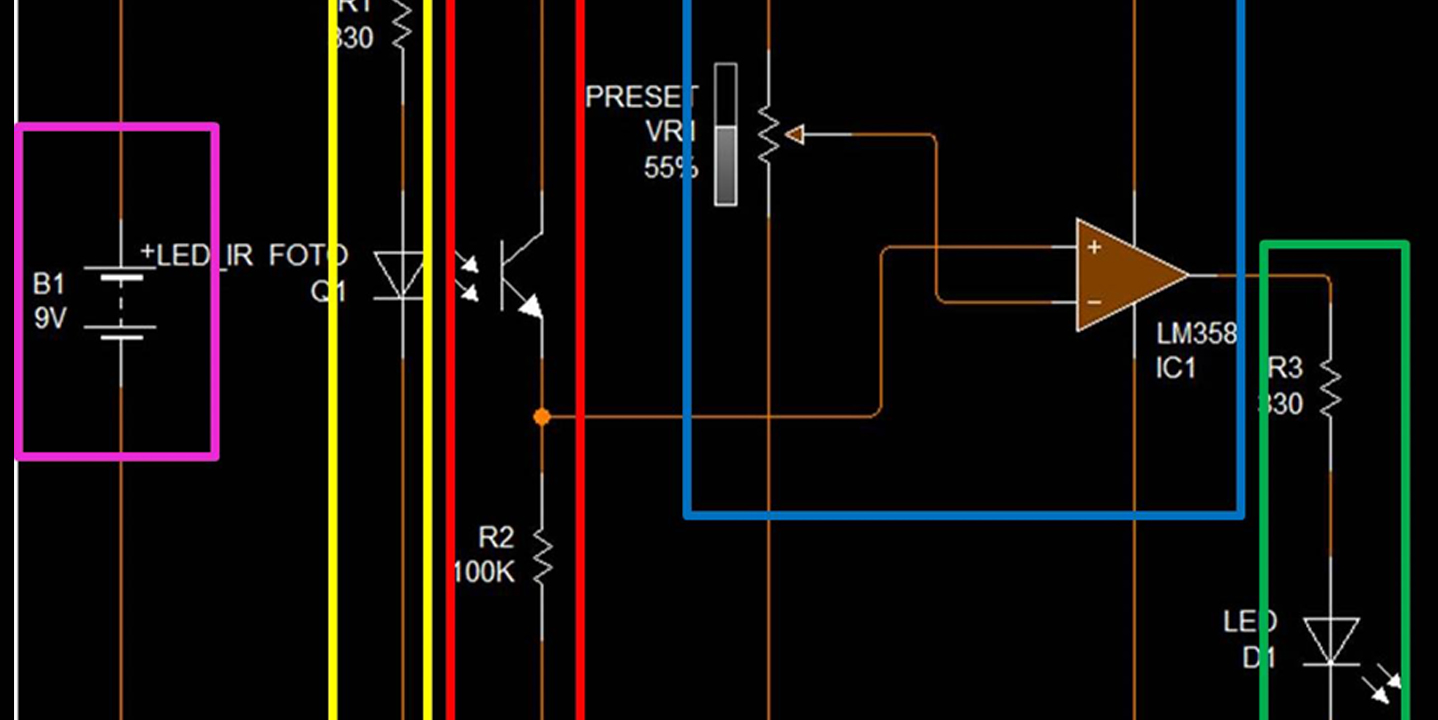
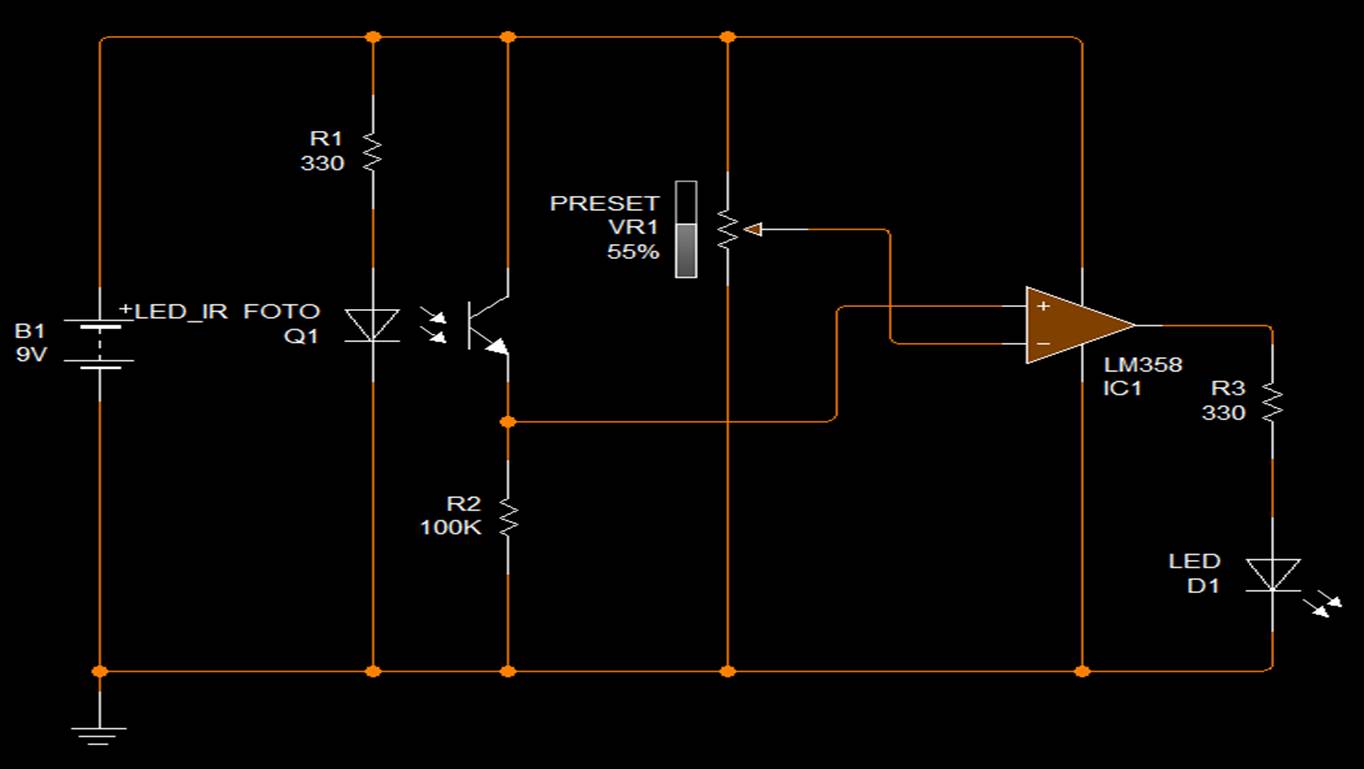
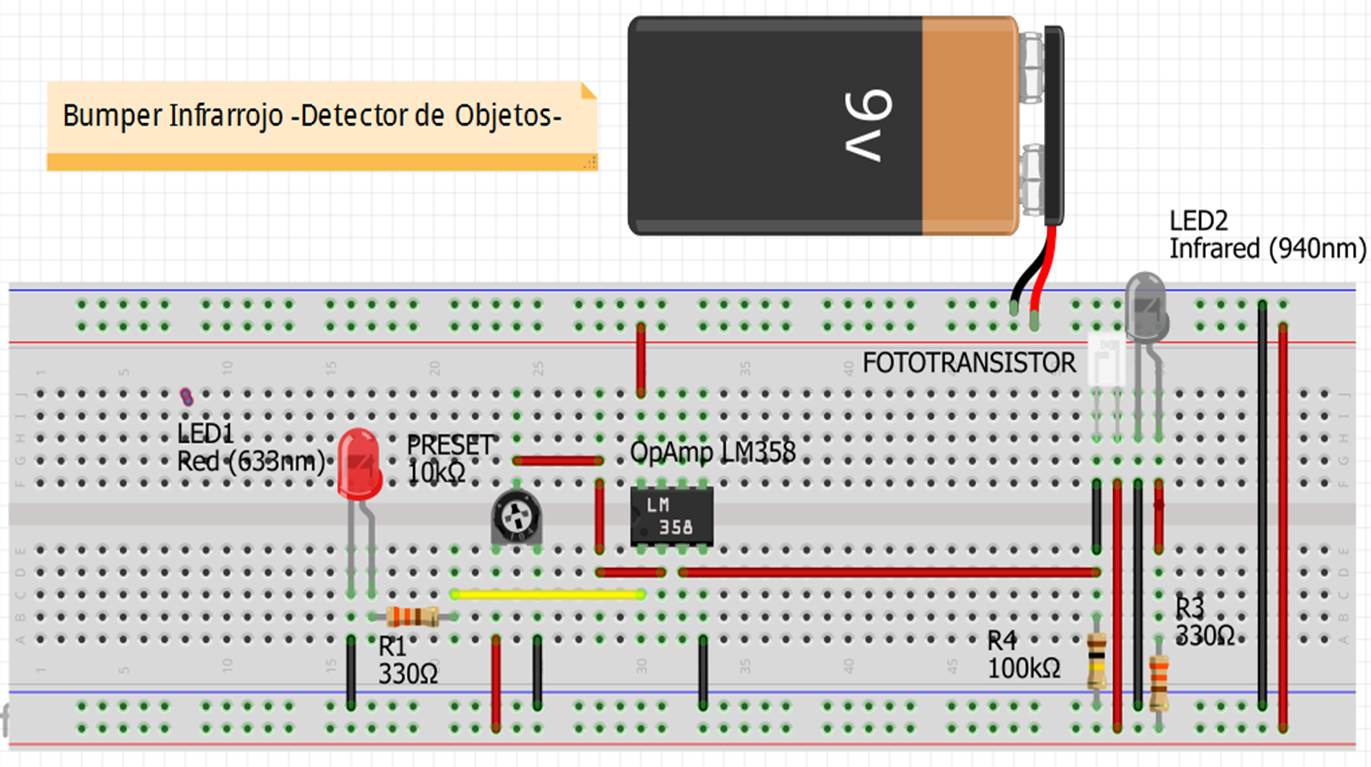
Para nuestro detector de objetos infrarrojo, utilizaremos una combinación de fototransistor con resistencia de “pull-down” de acuerdo al diagrama:
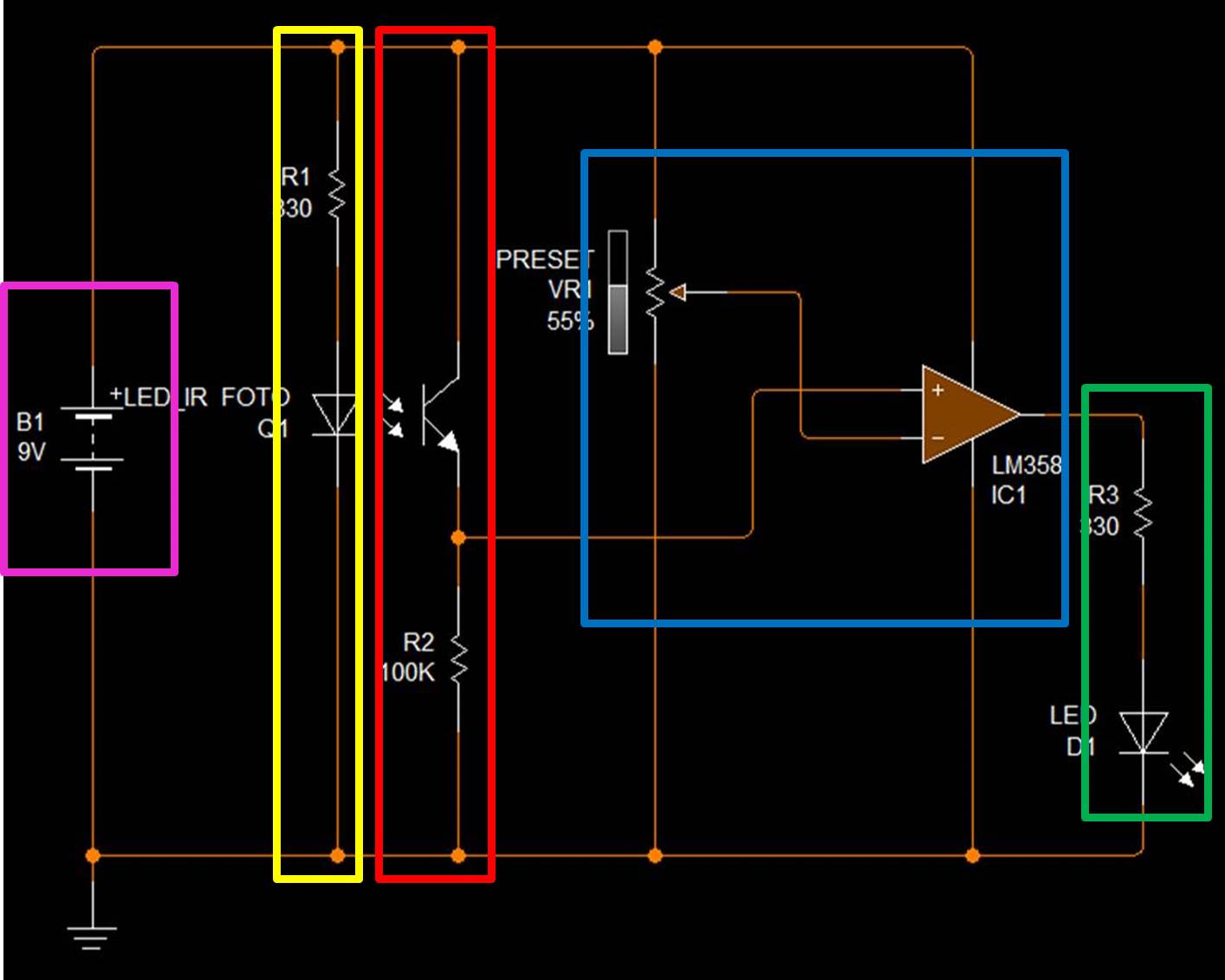
En la figura podemos ver dentro del recuadro magenta la fuente de alimentación dada por nuestra pila “cuadrada” de 9 volts; en el recuadro amarillo el led infrarrojo con su resistencia limitadora de corriente; en rojo la combinación de fototransistor con resistor de pull-down; en azul el amplificador operacional en modo comparador y en verde tenemos como salida del amplificador operacional un led normal con su resistencia limitadora de corriente.
Recordemos rápidamente el aspecto de nuestro protoboard:
El broche para conectar nuestra pila de 9V y nuestra pila:


En cuanto a las resistencias o resistores, recordemos verificar los colores para asegurar que son del valor que requerimos, en la lista de materiales podemos obtener el código de color:

Referente a los Led, pueden servir los de 5mm en tu color favorito.

El amplificador operacional LM358, les presentamos la descripción de las terminales, se trata de un circuito integrado analógico, el cual contiene dos amplificadores operacionales (A y B), del que solo utilizaremos el amplificador operacional A.
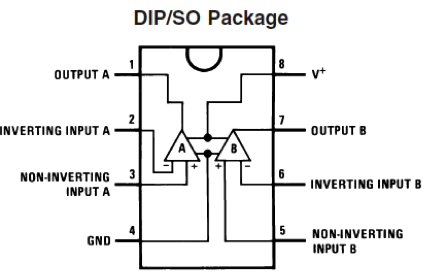
La utilización será en modo comparador, lo que quiere decir que solo existirá una salida en la terminal 1, cuando el voltaje en la terminal 3 (no inversora), sea mayor que el voltaje presente en la terminal 2 (inversora), que está conectada al divisor de tensión formado por el preset horizontal.
Esta comparación de niveles de voltaje, hace posible controlar el umbral de disparo de la salida, pudiendo controlar por lo tanto la distancia de detección, la cual en este caso puede variar de 5 a 10 centímetros.
El led infrarrojo para larga distancia IR383, tiene un encapsulado azul, sin embargo, recuerda que al ser infrarrojo NO se puede ver, pero si gustas, puedes encender la cámara de tu teléfono y podrás observar que emite un color rosa.

El fototransistor es un transistor NPN cuya base NO tiene conexión externa y está dada por una superficie fotosensible; de forma externa solo cuenta con el Colector (patilla más corta), y el emisor (patilla más larga).

Ya identificados nuestros componentes, vamos a realizar el montaje de éstos en el protoboard de la siguiente manera:
Ya que estén todos los componentes en su lugar y los puentes conectados, te sugerimos revisar nuevamente los nodos de conexión y las conexiones de estos puentes, con la finalidad de encontrar posibles errores para corregirlos antes de energizar el circuito.
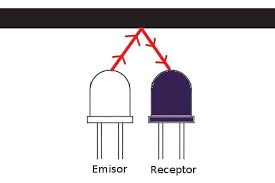
Ten cuidado de que tanto el led infrarrojo como el fototransistor estén físicamente uno al lado del otro, esto es muy necesario ya que trabajaremos utilizando la reflexión de la luz, por lo que la luz infrarroja emitida por el led podrá “rebotar” en una superficie de color claro, regresando hacia el fototransistor, polarizando su base y aumentando el nivel de tensión en la patilla número 3 del amplificador operacional.
Ahora necesitamos un pequeño trozo de tubo termocontráctil –termofit-, para cubrir el fototransistor y evitar que la luz infrarroja del ambiente lo active, de tal forma que solo sea activado por la reflexión de la luz de nuestro led infrarrojo, observa la imagen:
Tubo termocontráctil:

Con ayuda de un pequeño destornillador, gira el cursor del preset hasta la parte media, esto fijará un valor de 4.5 volts en la patilla número 2, por lo que el led de la salida solo encenderá si el objeto es detectado a una distancia tal que aumente el voltaje en la patilla 3 por encima de esos 4.5 volts.
Ahora puedes realizar el ajuste de la distancia de detección con solo girar el cursor del preset. Si quieres disminuir la distancia de detección, basta con girar poco a poco el cursor del preset hacia la izquierda; por el contrario, si quieres aumentar la distancia de detección, deberás girar hacia la derecha.
Esta operación la debes realizar poco a poco y realizando pruebas para poder calibrar el disparo a la distancia necesaria.
¡Excelente!, ahora puedes adaptar este detector de obstáculos al robot móvil que montamos en “Hacia el Espacio” del mes de noviembre de 2013.
Te recordamos visitar www.alldatasheet.com para descargar las hojas de datos de los componentes que utilizamos para conocer más sobre su funcionamiento.
Para cualquier duda o comentario, no dudes en contactarnos.
elprofe_tellez@hotmail.com