La mayoría de las naves espaciales contienen instrumentos o antenas que requieren apuntar en direcciones específicas mientras se encuentran en órbita: los páneles solares deben apuntar hacia el sol, las antenas de comunicaciones y los sensores de percepción remota deben apuntar a regiones específicas de la Tierra; los telescopios de un satélite de observación astronómica deben apuntar hacia una región del universo. Por lo tanto, una función muy importante de una nave espacial es el control de su orientación. El sistema que lleva a cabo esta función se le llama Sistema de Determinación y Control de Orientación, (Attitude Determinination and Control System) ADCS por sus siglas en inglés. El control de la orientación puede ser pasivo o activo. En el control pasivo la nave se orienta por si misma por efecto de una fuerza externa como la gravedad o el campo magnético de la Tierra. Un ejemplo de control pasivo para satélites pequeños es un boom gravitacional, el cual es simplemente una masa montada en una extensión telescópica que alinea al satélite a la vertical por efecto de la diferencia de la fuerza gravitacional de la Tierra en sus extremos. La ventaja del control pasivo es su sencillez, su desventaja es su inflexibilidad, ya que sólo se logra orientar a la nave en una dirección específica.
Ejemplo de boom gravitacional
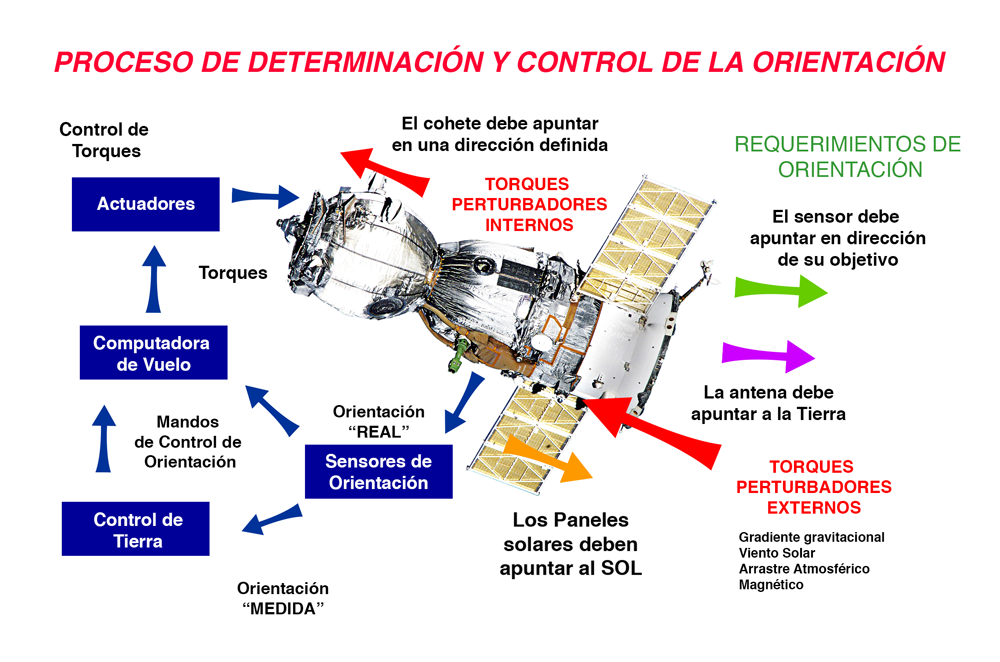
En el control activo, es necesario determinar la orientación actual de la nave con respecto a un sistema de referencia, preferentemente inercial, por medio de sensores, y a partir de ello aplicar torques por medio de actuadores para lograr la orientación deseada. El control generalmente lo realiza la computadora de vuelo de manera autónoma o por medio de órdenes que envía el control de Tierra. La computadora de vuelo ejecuta un algoritmo de control que debe tomar en cuenta las variables dinámicas de la nave como su geometría y distribución de masa.Además de los torques de control que generan los actuadores, la nave está sujeta a torques perturbadores, que pueden ser internos o externos. Estos torques son consecuencia de fuerzas internas o externas a la nave espacial y deben ser compensados por los torques de control para conseguir la orientación deseada. Entre las causas principales que generan estos torques están:
Torques internos:
- Ruedas de reacción
- Despliegue de paneles solares e instrumentos de exploración
- Chapoteo de líquidos
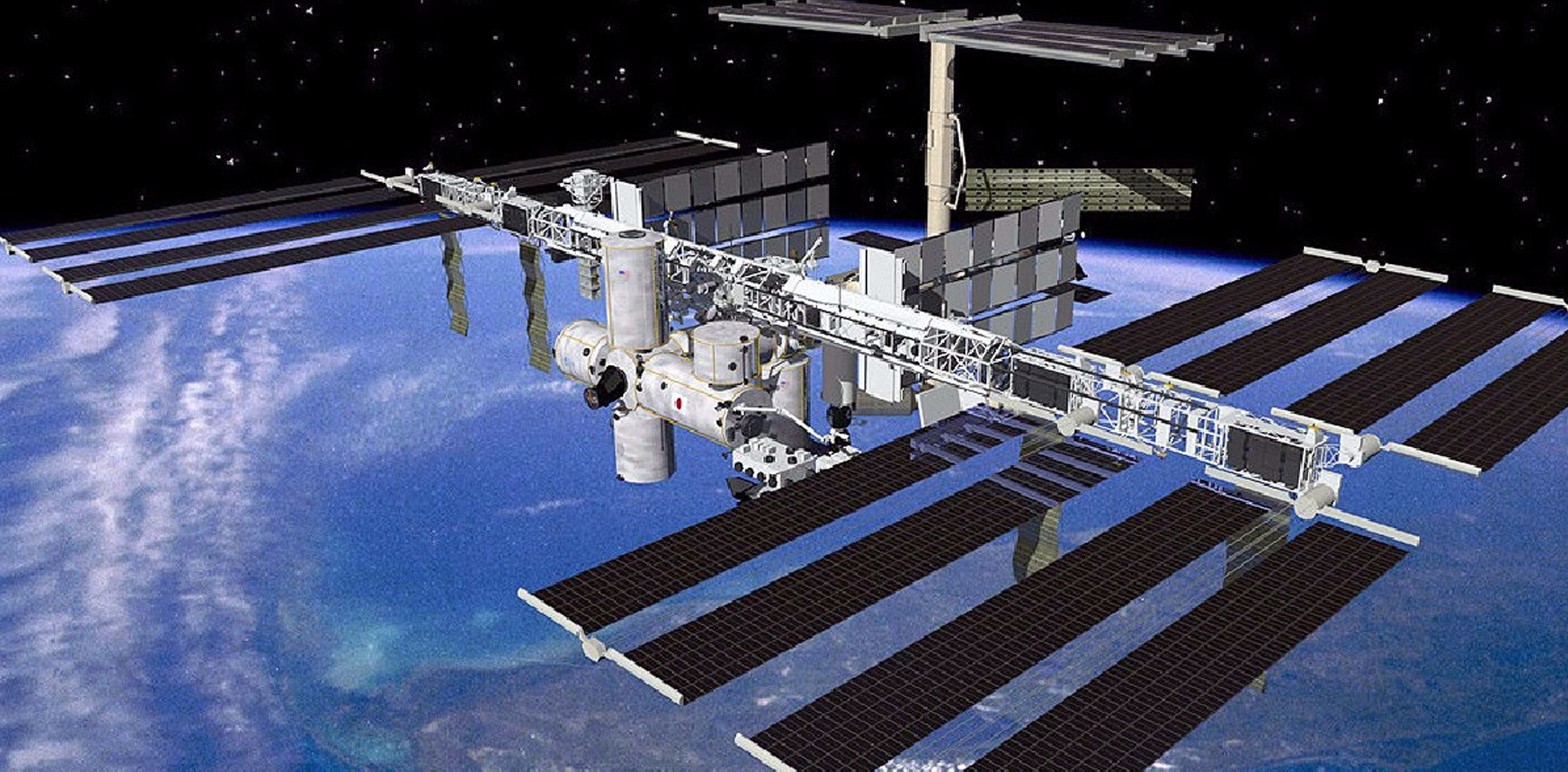
- Movimiento de astronautas en el interior de una estación espacial tripulada
- Redistribución de combustible que fluye a los motores
Torques externos
- Fuerzas aerodinámicas (arrastre, sustentación) -cuando la nave está cerca de la tierra-
- Gradiente de gravedad: Debido a la pequeña diferencia en la atracción gravitatoria desde un extremo de la nave espacial a la otra (la misma fuerza diferencial que produce las mareas).
- Par magnético: Debido a la interacción entre el campo magnético nave espacial y el campo magnético de la tierra. Radiación solar: Debido tanto a la radiación electromagnética y como a las partículas que irradia el sol.
- Micro-meteoritos: Significativo sólo en la región del anillo de Saturno, el cinturón de asteroides, etc.
La siguiente figura ilustra el proceso de determinación y control de la orientación de manera gráfica.
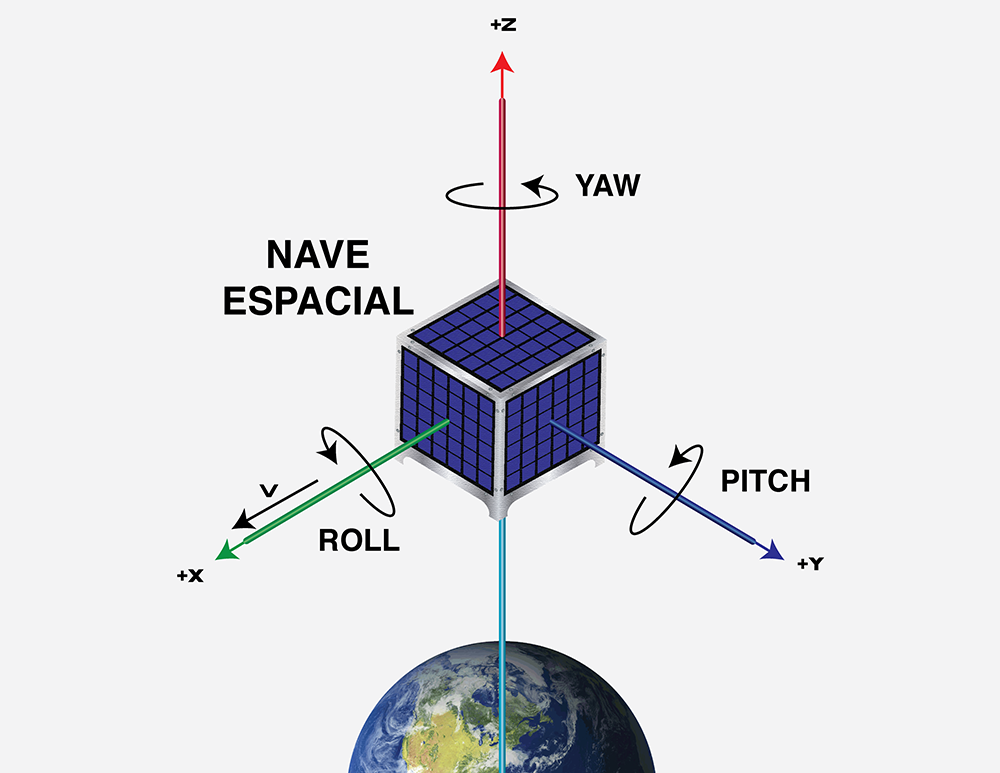
Existen varios sistemas de referencia que se utilizan para establecer la posición y orientación de las naves espaciales. Dependiendo de la misión, el sistema de referencia puede estar centrado en la tierra o en el sol. La orientación de la nave espacial se puede representar de diversas maneras. Una de las más comunes es a través de los ángulos de navegación o ángulos de Euler, los cuales se miden a través de 3 ejes perpendiculares con origen en el centro de masa de la nave. Estos ángulos son:
- Alabeo (Roll), que es el ángulo con respecto al eje de la velocidad de la nave (Eje X)
- Cabeceo (Pitch) el ángulo sobre el eje perpendicular al eje de velocidad sobre el plano de la órbita (Eje Y)
- Guiñada (Yaw) El ángulo sobre el eje perpendicular al plano formado por los ejes X y Y (Eje Z)
Los sensores y actuadores del ADCS pueden ser de muy diferentes tipos y su selección dependerá de la misión. Existen sensores de Sol, de Tierra, de horizonte, magnéticos, de estrellas, entre otros. Los actuadores pueden ser cohetes propulsores, ruedas de reacción, giroscopios y bobinas magnéticas, también entre muchas opciones.
Los requerimientos de exactitud y rapidez de respuesta en el control de orientación de una nave espacial dependen de la misión. No es lo mismo requerir sacar fotos de la tierra para demostrar que la nave está en órbita, como puede ser el objetivo de una misión académica, que el controlar los sensores infrarrojos de un satélite de observación de la tierra para hacer mediciones geodésicas. Por lo anterior existen muchos tipos de ADCS y su diseño dependerá de los requerimientos de la misión.
Las especificaciones de exactitud, rapidez de respuesta y número de ejes a controlar, entre otras, determinarán el tipo de sensores y actuadores a considerar, así como el algoritmo de control. El ADCS es uno de los subsistemas más demandantes de una nave espacial y típicamente domina el diseño global del vehículo. Los componentes del ADCS tienden a ser relativamente masivos, consumen bastante energía y admiten poca tolerancia en su alineación y orientación por lo que su diseño debe realizarse con mucho cuidado.