Fuera de la biósfera terrestre no es posible la supervivencia de cualquier organismo vivo, debido a la falta de oxígeno, presión atmosférica, fuerza gravitacional, temperatura ideal, etc. Esto obliga a los astronautas que viajan a través del espacio a utilizar un traje especial para contrarrestar los efectos nocivos que presentan en estas condiciones.
El diseño de trajes espaciales es una tarea interdisciplinaria y de investigación tecnológica avanzada. En el proceso de diseño intervienen cuestiones como el tipo de materiales a utilizar, la distribución de los componentes, el ensamble, distribución de cableado, ergonomía, técnicas para mantener un sistema hermético, entre otras. Los centros de investigación y desarrollo espacial trabajan constantemente en el diseño de nuevos prototipos para realizar pruebas y análisis que finalmente se convertirán en una nueva generación de trajes espaciales.
Esta publicación es la continuación de una serie de publicaciones que hemos trabajado desde Enero de 2018. En esta entrega pondremos en práctica todo lo aprendido anteriormente, si te perdiste de alguna publicación te recomendamos que le des un vistazo.
--¿Qué es la robótica?: Introducción a la robótica y microcontroladores
--Termómetro digital con Arduino: La importancia de la temperatura corporal en el espacio
--Sistemas de instrumentación en tecnología espacial: Visualización de datos con Arduino
--Las dimensiones del universo Midiendo distancias con Arduino
--Medicina Espacial: Medición de la frecuencia cardíaca con Arduino
Para ponernos en contexto en esta publicación hablaremos sobre los trajes espaciales o como correctamente se les debería llamar EMU (Extravehicular Mobility Unit por sus siglas en inglés). Este traje fue diseñado específicamente para ser utilizado en misiones EVA (Extravehicular Activity), las cuales se llevan a cabo fuera de la Estación Espacial Internacional.
El EMU protege al astronauta y brinda lo necesario para que pueda mantenerse con vida en el espacio.
- Oxígeno
- Control de temperatura
- Protección contra polvo cósmico
- Protección contra micro meteoritos
- Protección contra diferentes tipos de radiaciones
- Recolección de desechos humanos
A lo largo de la historia de la carrera espacial, han existido numerosos trajes espaciales, donde cada uno es mejor a su antecesor. Los primeros trajes espaciales no eran adecuados para la actividad extravehicular y su uso se limitaba únicamente dentro de la ISS. Gordon Cooper en 1959 usó el primer traje desarrollado para la misión Mercury. Este traje no contaba con ningún sistema de presurización, cabe destacar que era similar a los trajes que utilizaban los pilotos de la fuerza aérea estadounidense.

A mediados de 1960 Neil Armstrong utilizó el primer traje presurizado, el Gemini G-2C, fue desarrollado para la misión Gemini. Este traje no implementaba la presurización per se, más bien, se conectaba por medio de un tubo conocido como “cordón umbilical” al sistema de presurización de la ISS.

Partes básicas de un space suit
En la actualidad el EMU es el traje espacial que utilizan los astronautas de la NASA. En general se compone de las siguientes partes:
-Subsistema de soporte de vida primario
-Parte superior del Torso
-Mangas y Guantes
-Módulo de control y visualización
-Torso inferior
-Casco
Para fines de esta publicación, nos enfocaremos a dos
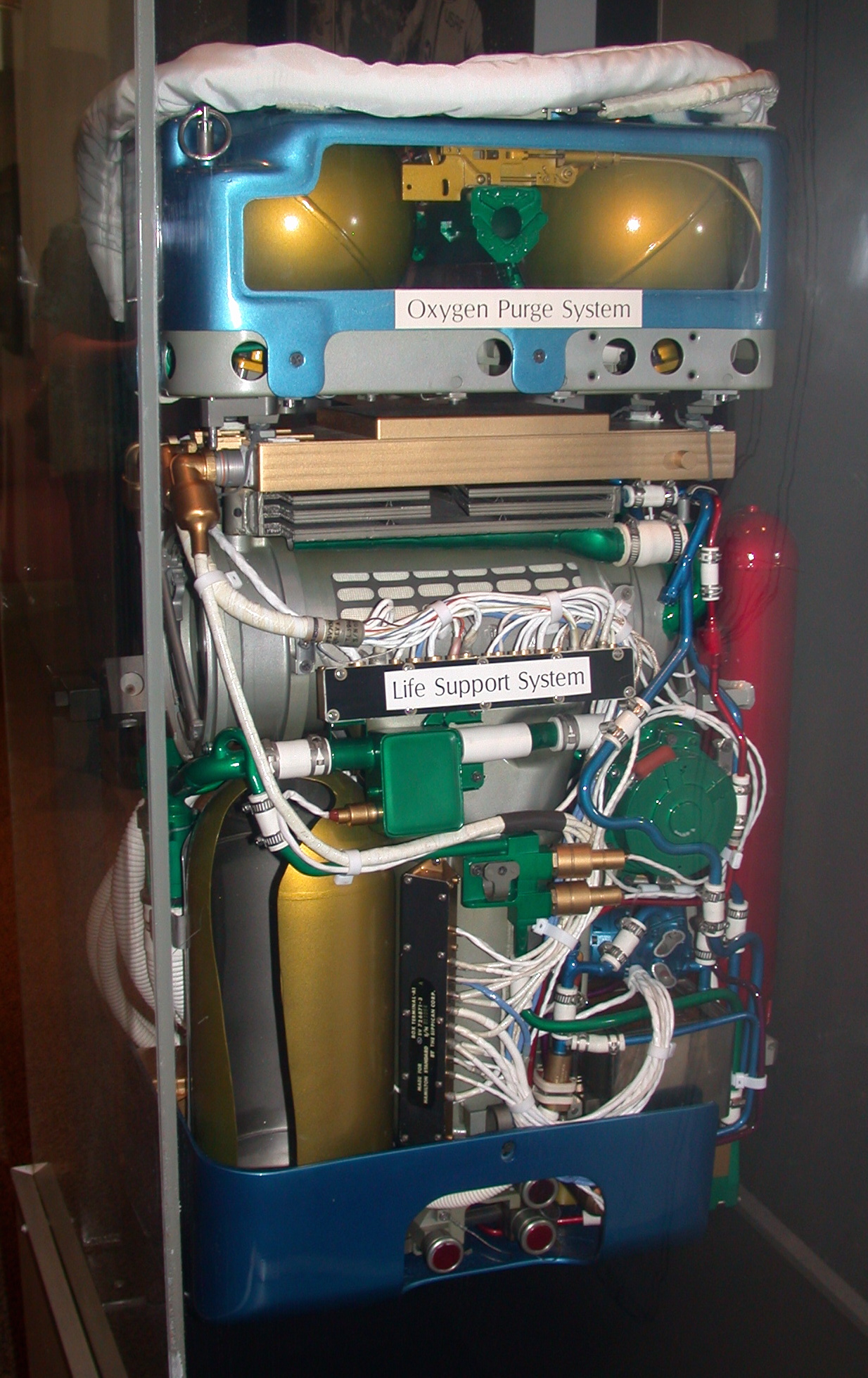
Subsistema de soporte de vida primario
Es uno de los subsistemas más importantes en el EMU, ya que provee de lo necesario para la supervivencia del astronauta. Físicamente es como una gran mochila que se carga en la espalda del portador. Es el encargado de proporcionar el oxígeno y expulsar el dióxido de carbono exhalado. También suministra energía eléctrica a todos los periféricos conectados por medio de una batería de gran capacidad. Mantiene fresca el agua que circula por el sistema de refrigeración para mantener una temperatura ideal para su ocupante. Además contiene el sistema de comunicación con el que se enlaza a la tripulación por medio de un par de radios.
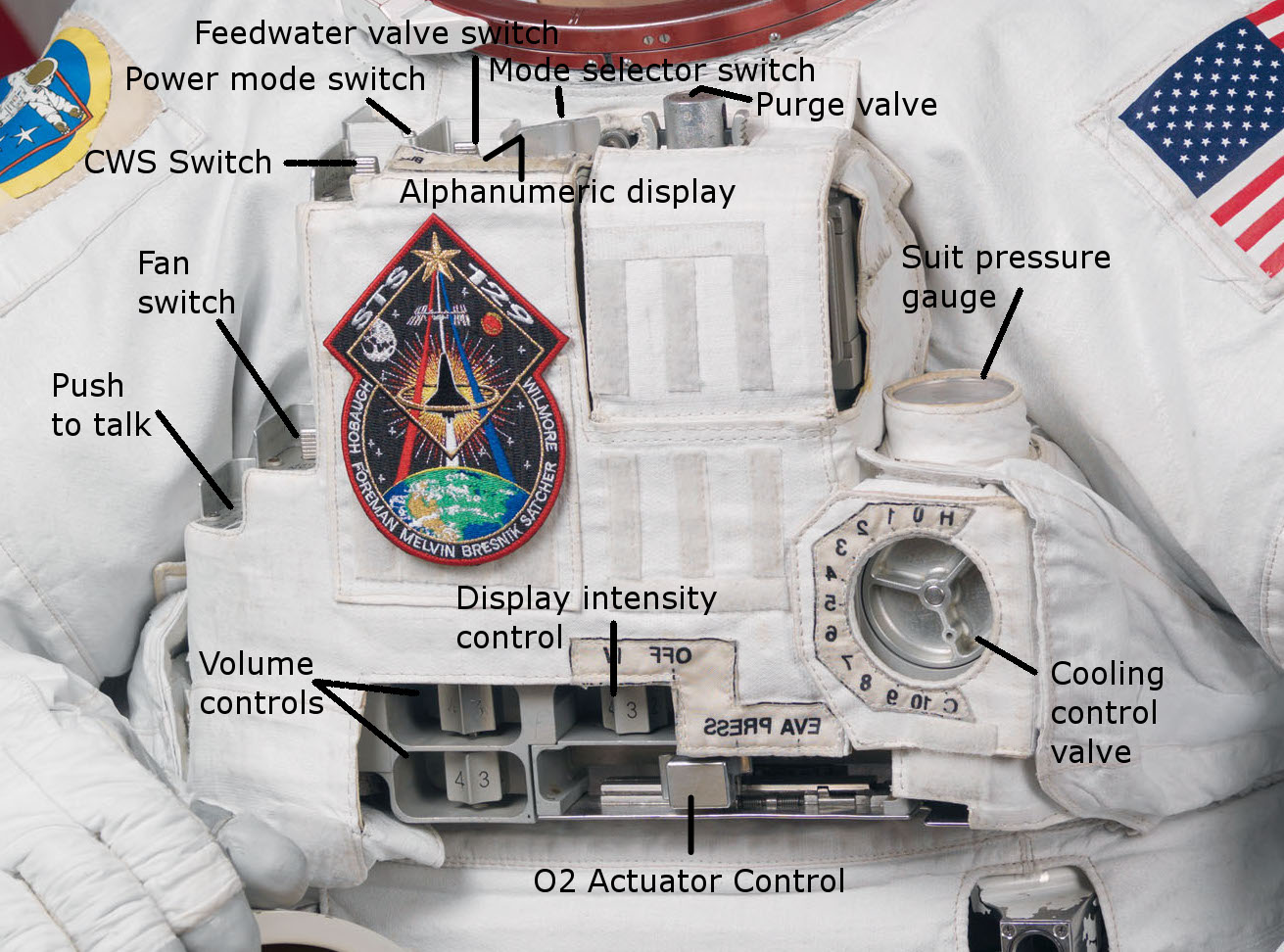
Módulo de control y visualización
Este es el panel de control de todo el traje espacial, contiene toda la electrónica necesaria para operar cada uno de los módulos.
Practica 6: Proyecto final Space Glove
Introducción
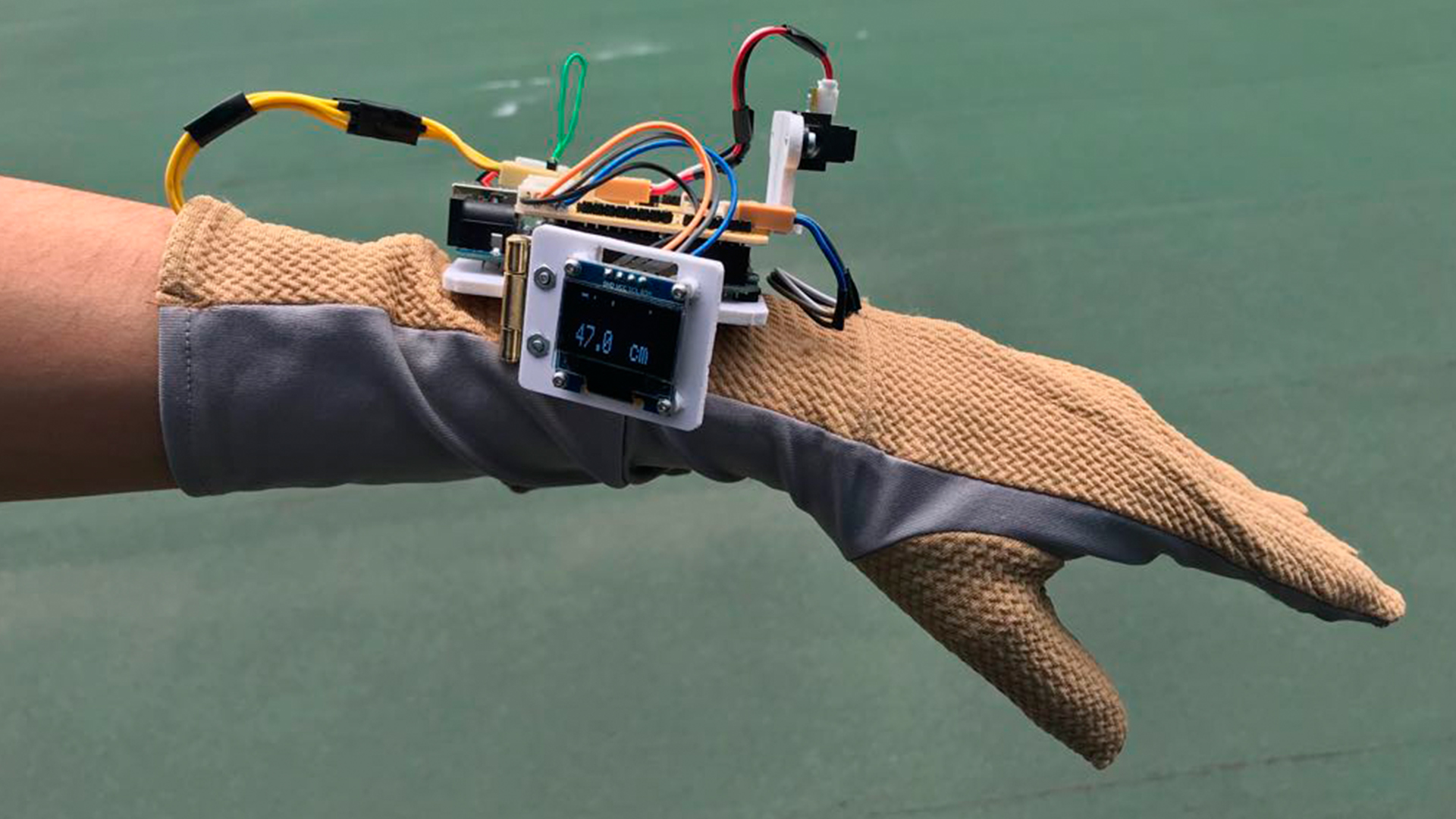
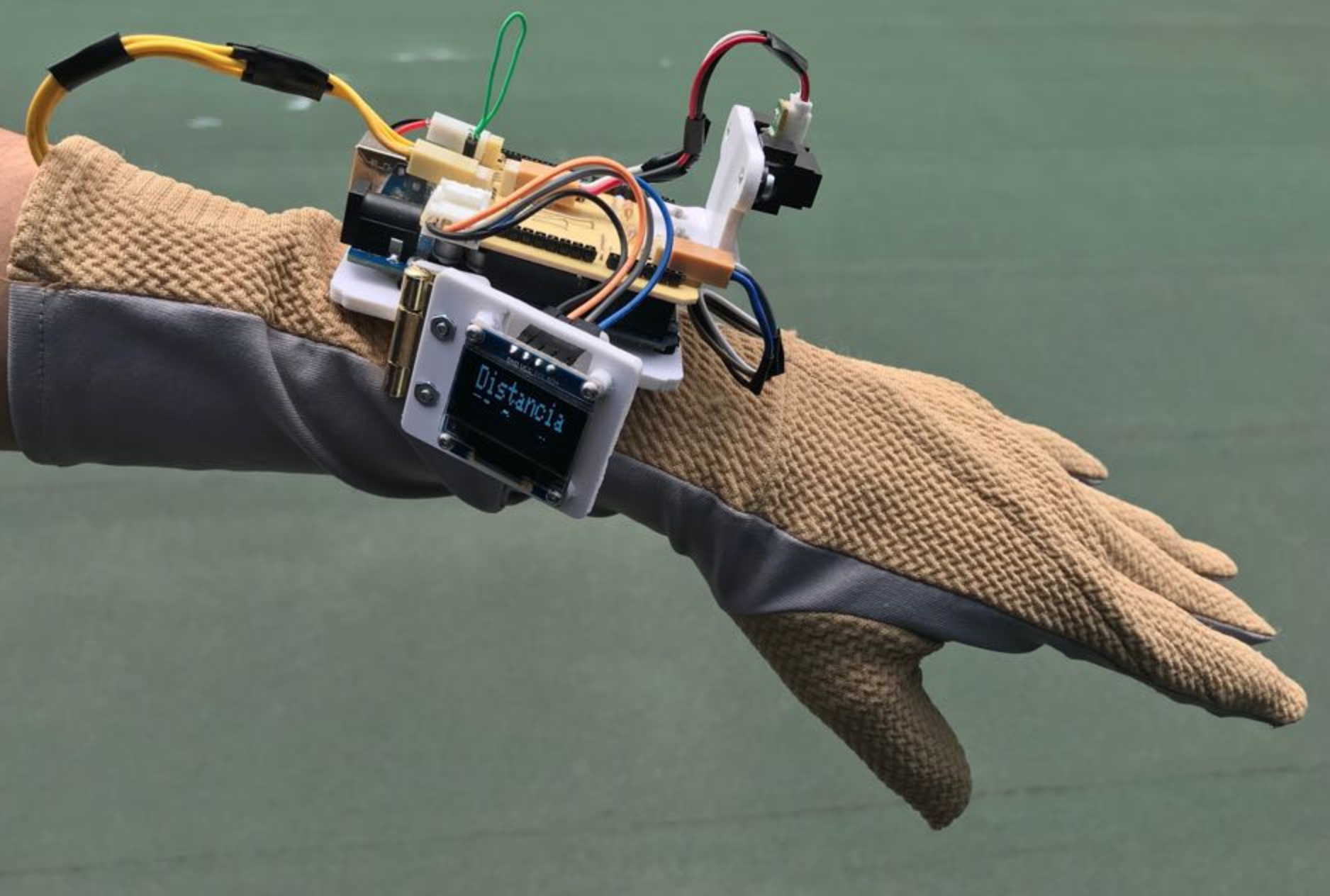
El Space Glove (como lo hemos llamado) permitirá realizar la medición de 3 variables físicas: Dos corresponden a constantes vitales del astronauta y la tercera como una herramienta para la medición de distancia. Además la información se mostrará en un display OLED monocromático.
Si te das cuenta en esta practica se unen los sistemas presentados anteriormente (sensor de temperatura, sensor de pulso, sensor infrarrojo y pantalla OLED).
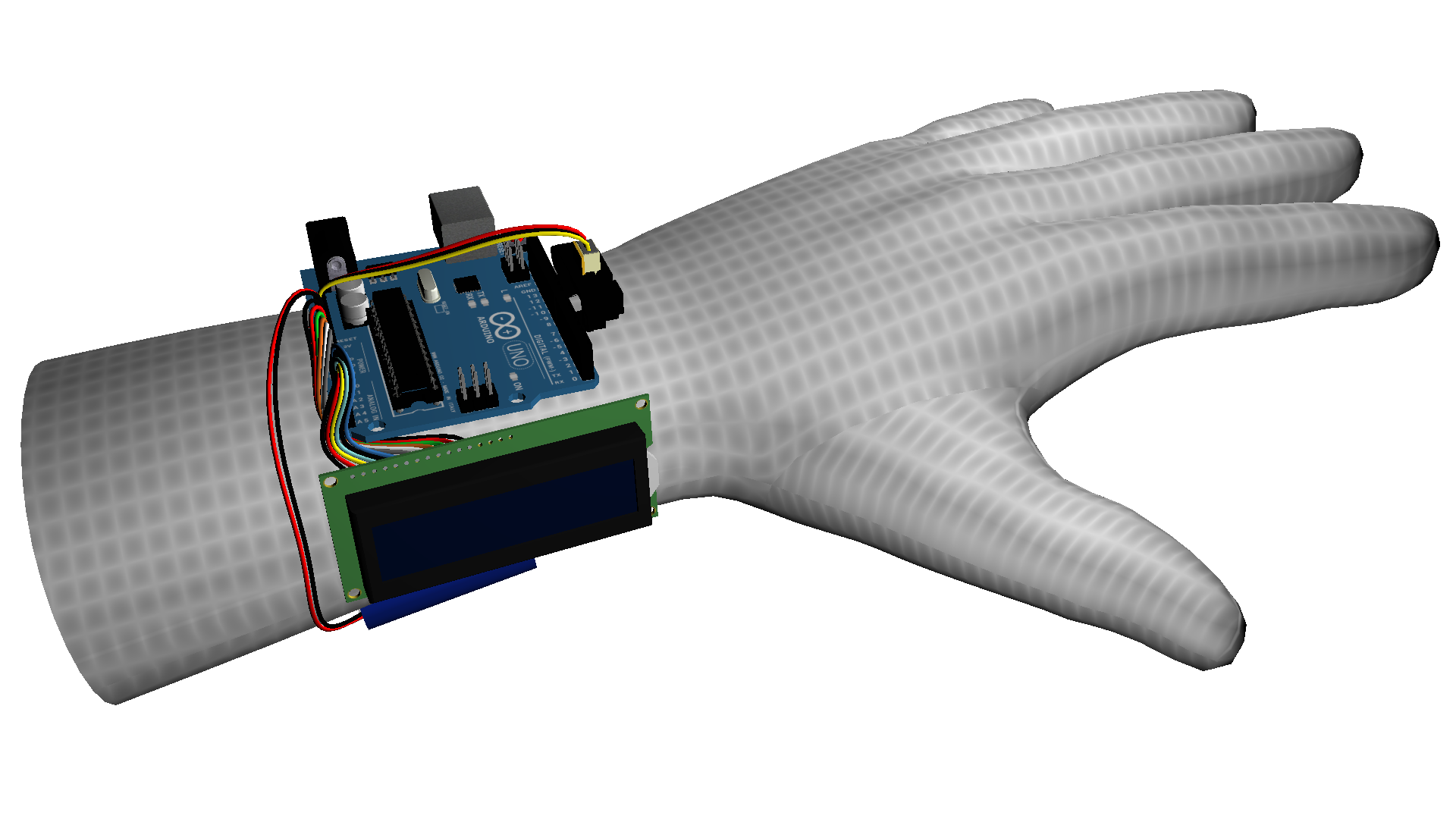
Antes de comenzar a fabricar el proyecto es importante mostrar el panorama general. En la siguiente imagen se muestra el primer modelo 3D que representa la idea general.
 El desarrollo del Space Glove se divide en dos partes: hardware y software.
El desarrollo del Space Glove se divide en dos partes: hardware y software.
Hardware:
Involucra la electrónica, los sensores, la placa Arduino y la alimentación eléctrica del sistema. Así como el soporte y la elección de los materiales para la estructura, su fabricación y el ensamble entre ellas.
Software
Es el código que se carga en el sistema de control (Arduino). Una vez programado recibirá el nombre de firmware.
En la siguiente imagen te presentamos un modelo 3D del producto final, en donde hemos señalado las partes que lo conforman.
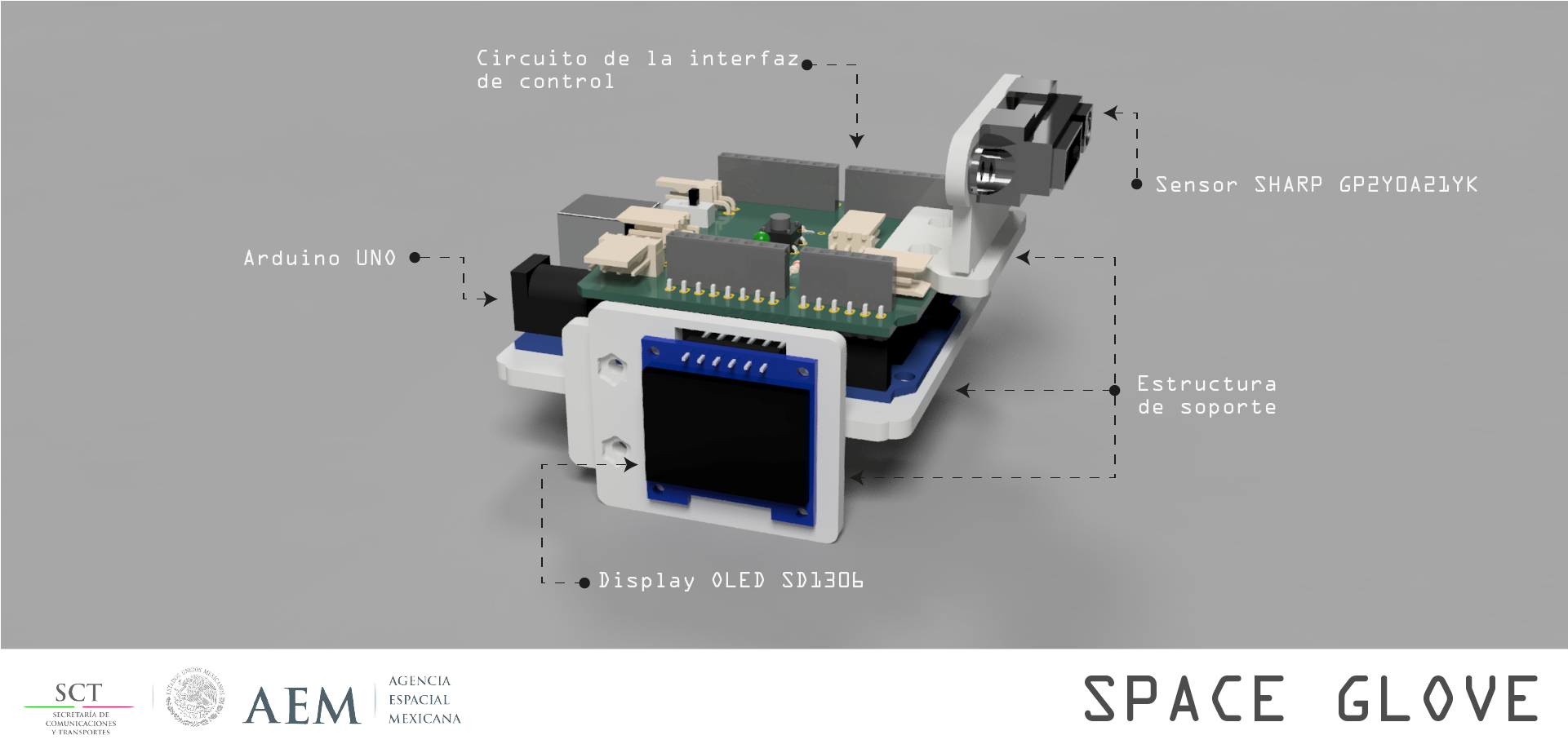
Arduino UNO
Es el núcleo lógico del sistema encargado de controlar cada uno de los procesos. Por ejemplo, realizar mediciones de temperatura, pulso cardíaco y distancia. Además de procesar la información y mostrarla en el display OLED.
Circuito de la interfaz de control
Si recuerdas, en prácticas pasadas utilizábamos una protoboard para realizar las conexiones. En este caso, será una placa de circuito impreso PCB. Este está fabricado en una placa fenólica, en ella están soldados los conectores y componentes necesarios para realizar las conexiones con el Arduino.
Estructura de soporte
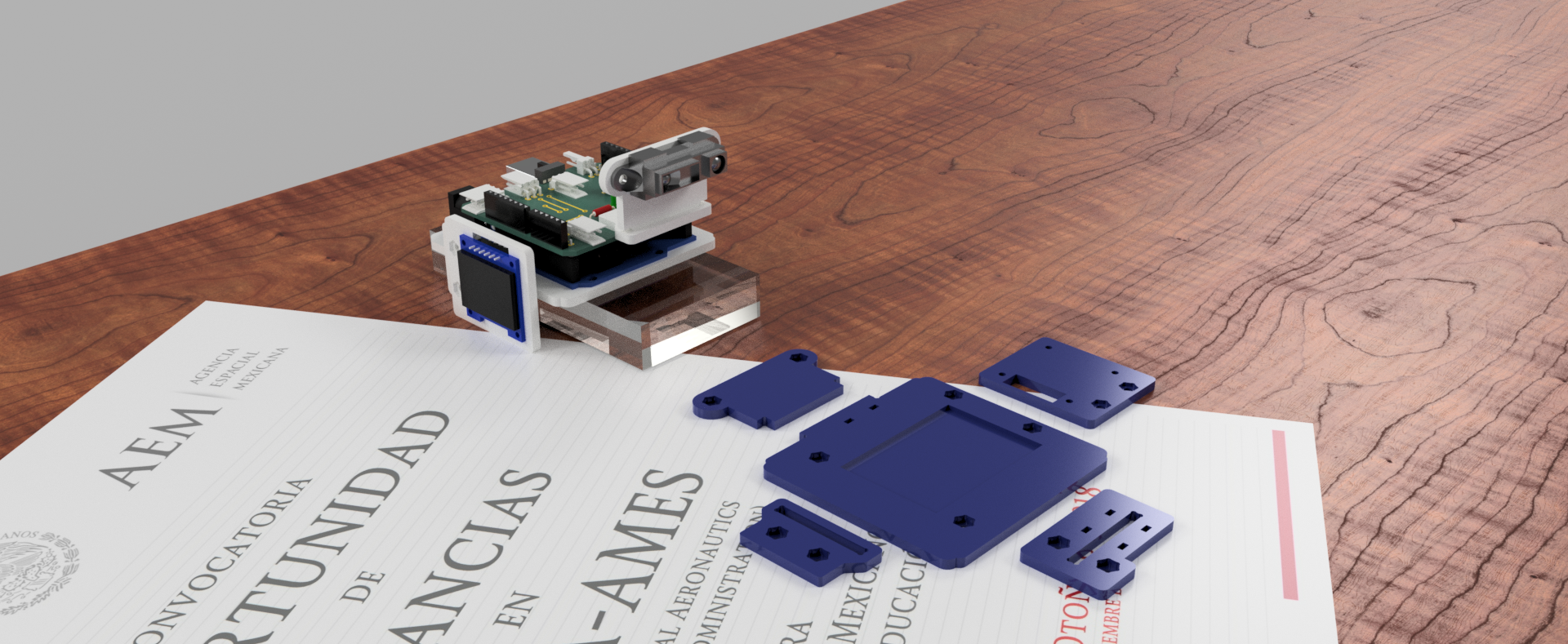
Estas piezas se ensamblan para soportar nuestro sistema electrónico. En otras palabras es el esqueleto que dará la rigidez necesaria para poder acoplarlo al guante. En la siguiente imagen puedes observar en color azul dichos componentes que fueron fabricados en una impresora 3.
Para que puedas poner en práctica lo que hemos aprendido hasta ahora, al final del artículo encontraras el enlace que te permitirá descargar los archivos para que tú también puedas imprimir las piezas en cualquier impresora 3D.

Fabricación del circuito electrónico
En esta sección te proporcionaremos lo necesario para armar el circuito de la interfaz de control (electrónica). Antes de comenzar, será necesario que aprendas un par de cosas. Recordarás que anteriormente hacíamos nuestros circuitos en una protoboard, para fines de prototipado. Cuando se trata de un producto final se fabrica algo que se conoce como PCB, Printed Circuit Board, que en español se entiende como placa de circuito impreso. En esta, se colocan los componentes, soldados a unas terminales llamadas pads, que hacen contacto con pistas conductoras que definen el camino de la corriente. Las ventajas de hacer esto, es proporcionar mayor robustez al circuito. Un ejemplo de ello es tu tarjeta de desarrollo Arduino. Si observas detenidamente, los componentes están soldados en una placa de cobre con un esmalte Azul.
Aunque estas placas las fabrica una industria especializada, existen métodos caseros que logran resultados bastante profesionales. Y para ello necesitarás los archivos fuente del Space Glove del diseño electrónico que podrás descargar al final de esta sección.
Enseñarte cómo fabricarla está fuera del alcance de este artículo debido a la profundidad del tema. Sin embargo, te demostraré cómo se hace. Así que te compartiré algunos enlaces a páginas web donde te explicaran explican de una manera detallada y muy amena cómo realizar tu propia PCB utilizando el método del “planchado”.
Como fabricar PCB
http://www.instructables.com/id/Homemade-double-layer-PCB-with-toner-transfer-meth/
https://www.youtube.com/watch?v=6uInan-TjiA
https://www.neoteo.com/circuitos-impresos-el-metodo-de-la-plancha/
https://giltesa.com/2011/08/21/fabricacion-de-circuitos-impresos-metodo-de-la-plancha
Como soldar componentes
https://www.youtube.com/watch?v=LSpmmEFwGKA
https://www.youtube.com/watch?v=VxMV6wGS3NY
Instrucciones de ensamble - Video de ensambe PCB
Cableado y coneccion de sensores
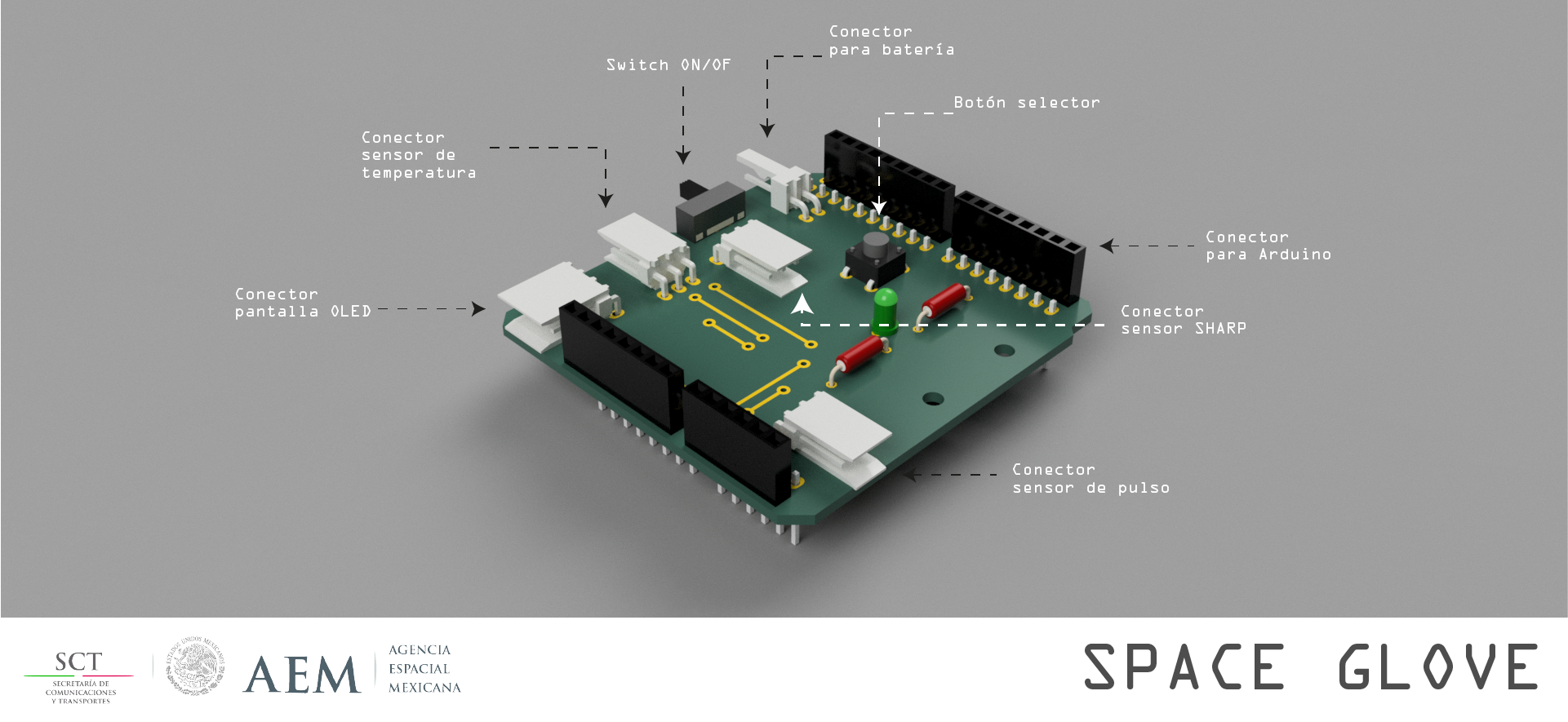
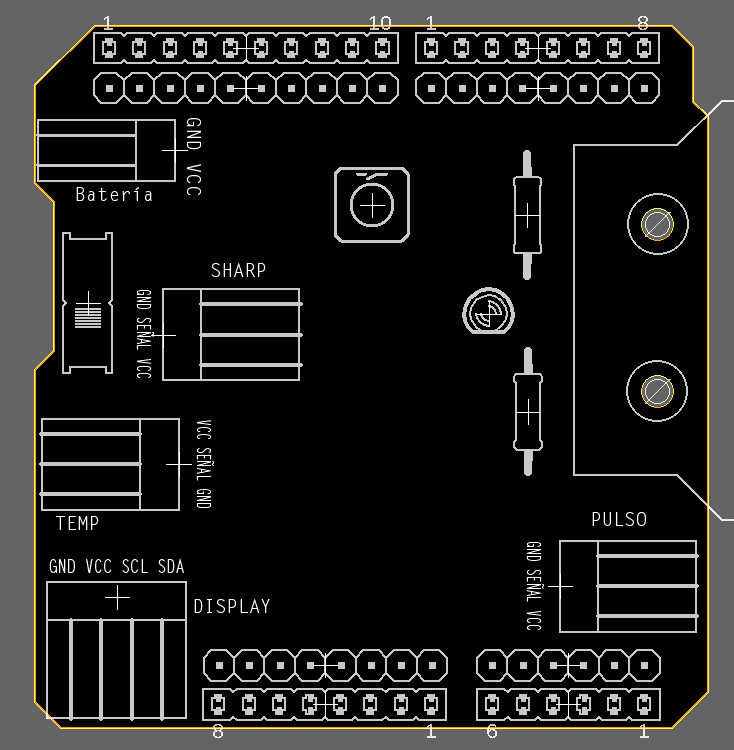
En esta sección te mostraremos cómo realizar la conexión de los sensores al circuito electrónico. En la siguiente imágen te mostramos la ubicación de los conectores con los nombres de sus pins. Es de mucha importancia que te asegures hacerlos coincidir con los nombres de los pins en los sensores. Antes que nada te recomendamos estudiar esta imagen. Intenta conectar cada terminal molex en el circuito para que tengas una idea de cómo quedará conectado cada sensor.
Tip: Deberás referirte a esta imágen para consultar cada vez que tengas alguna duda.
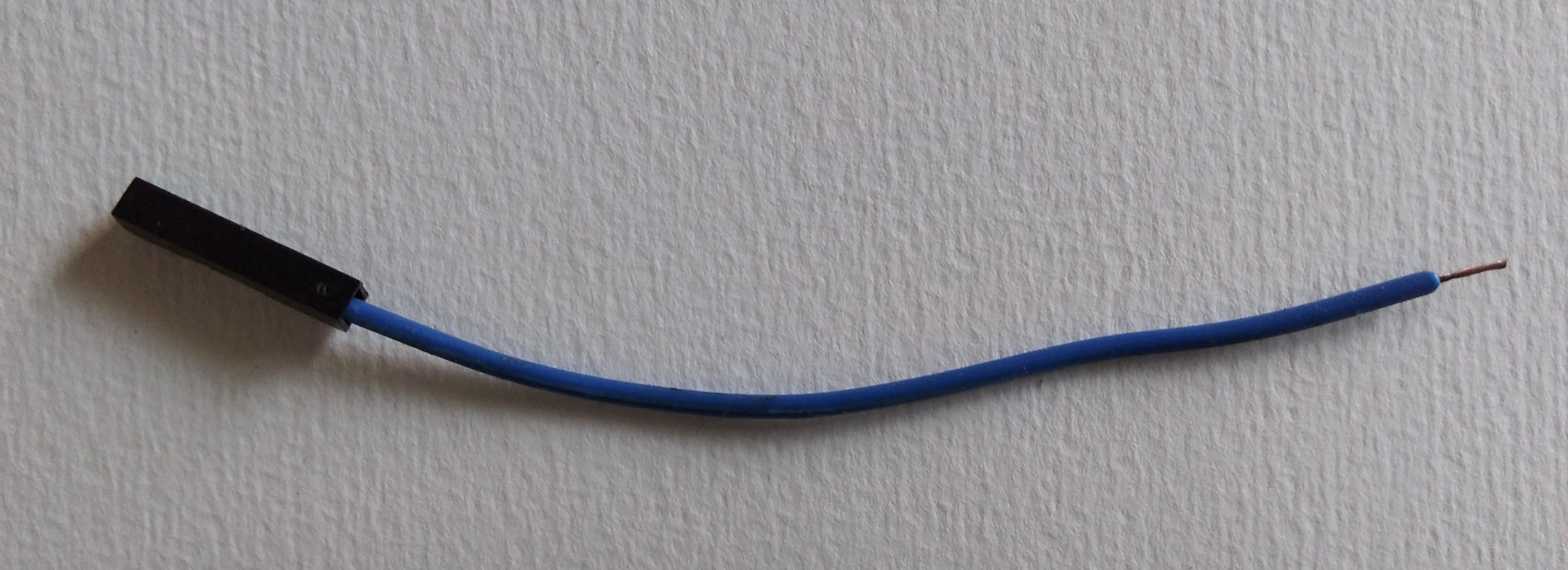
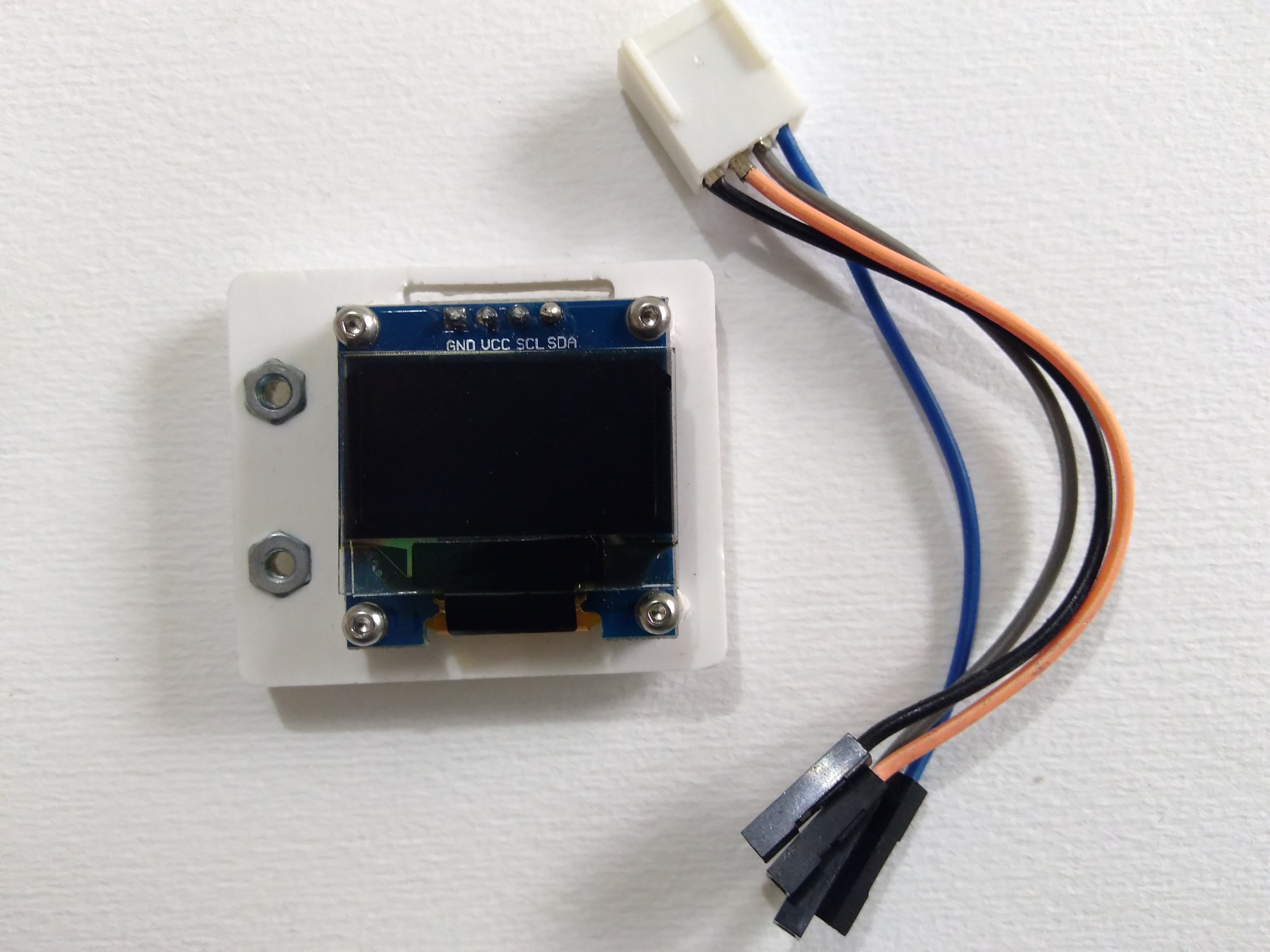
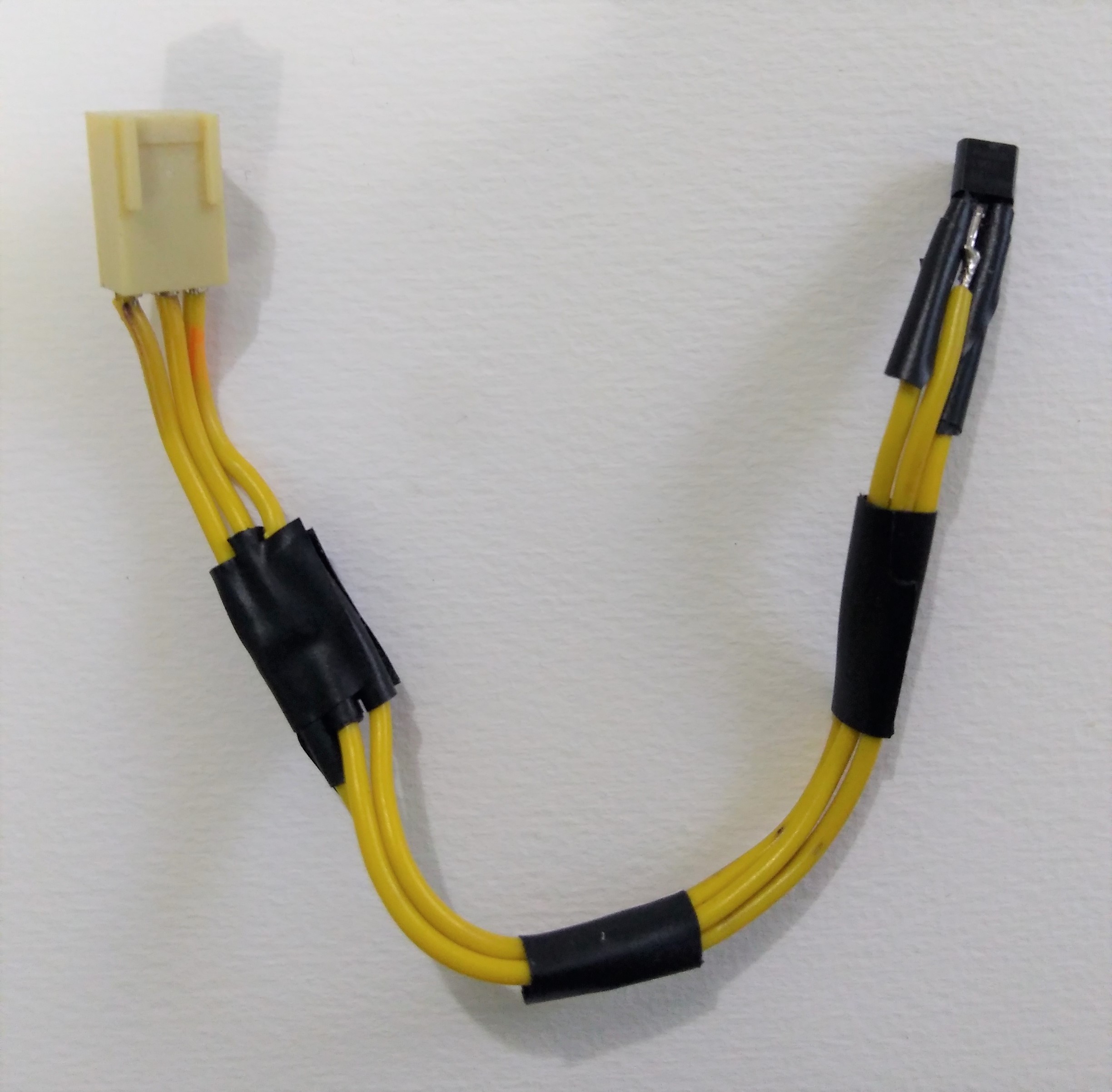
Primero veamos como conectar el Display OLED. Para ello necesitarás cortar un cable dupont aproximadamente de 8cm de largo, dejando en un extremo el conector hembra y en el otro lado deberás pelar el cable entre 5mm para dejar descubierto el conductor.
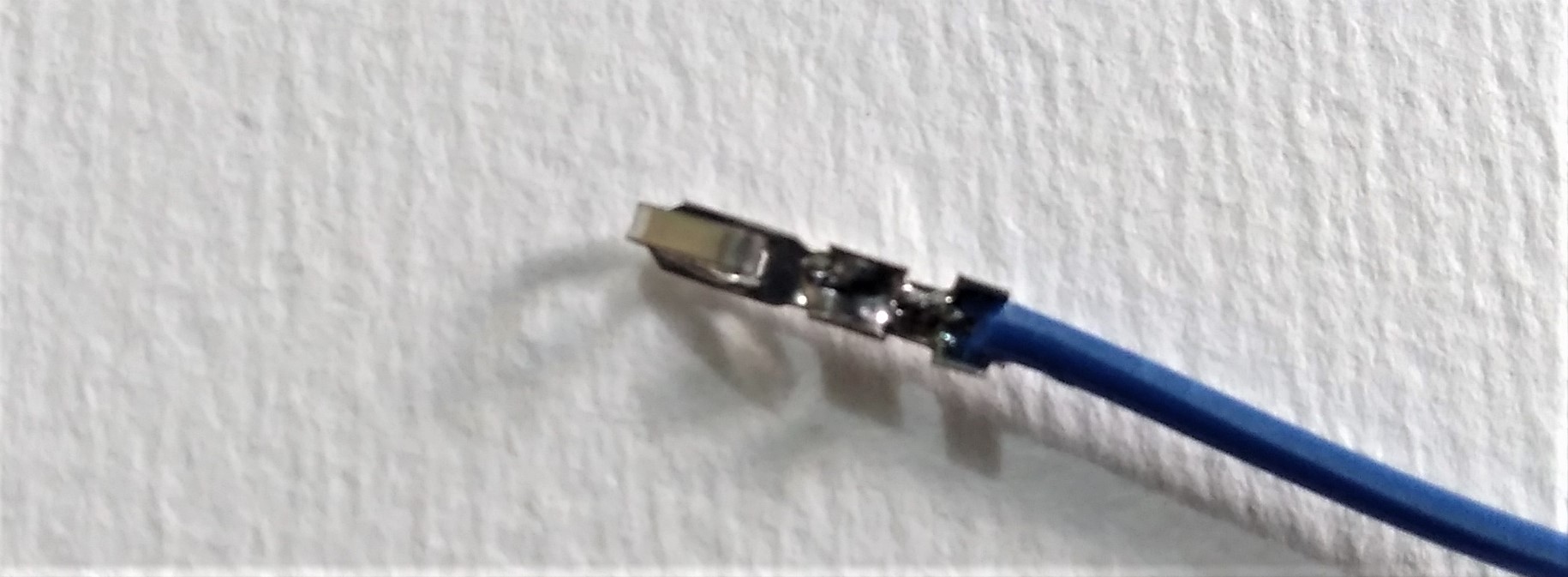
Con un poco de soldadura y ayuda de un cautin deberas estañar la punta del cable y colocarlo dentro de una de las laminillas que se incluyen en los conectores molex hembra. A continuacion pon un punto de soldadura en el centro para fijar el cable y la terminal.
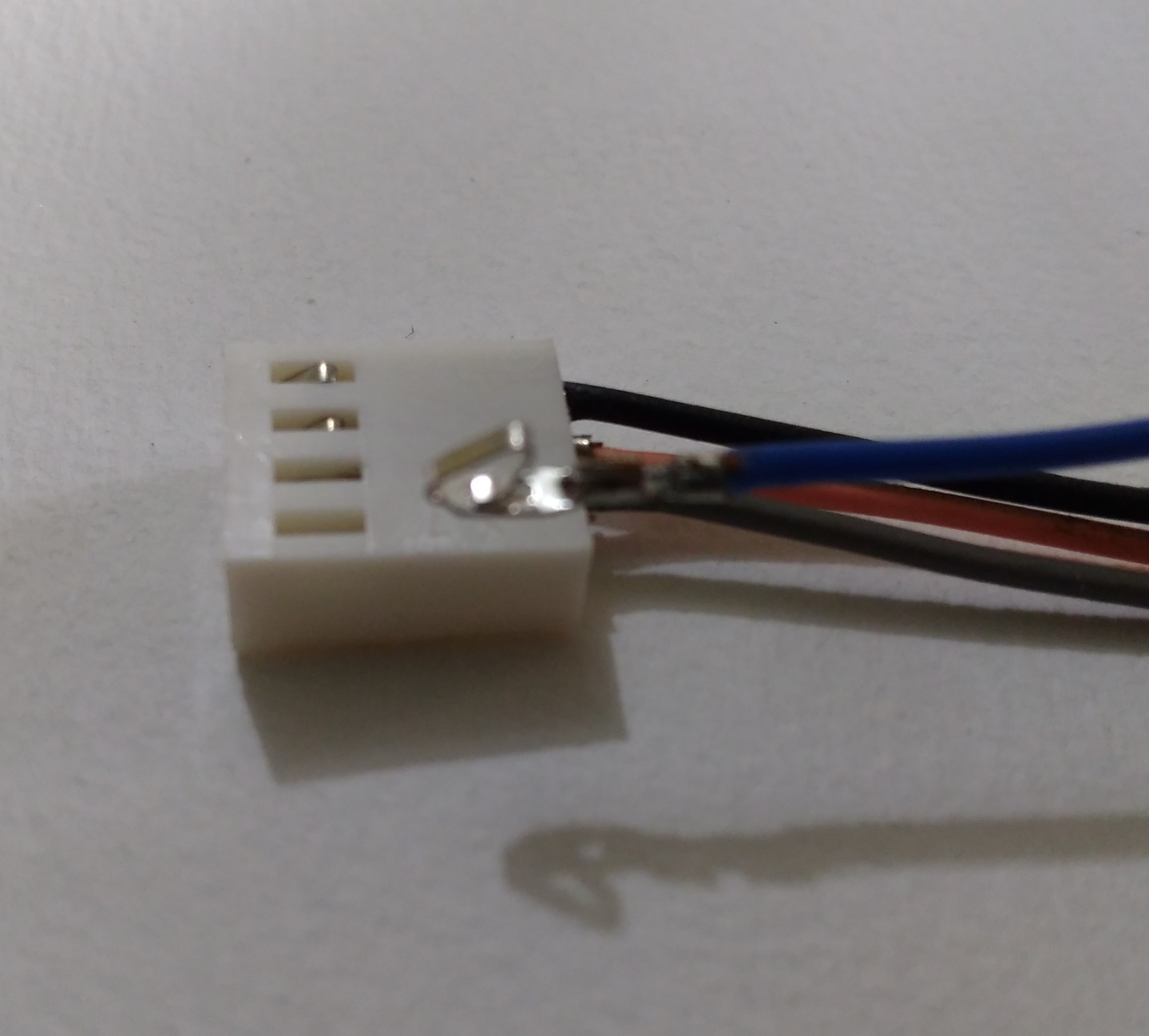
Deberás repetir el procedimiento en 4 cables para tener la cantidad necesaria para alambrar el Display OLED. Observa como cada uno de ellos se inserta en el conector molex hembra. Debes tener precaución de colocar los cables en la posición que se indica en la imágen de abajo: con el "pico" hacia arriba, así este se atorará en la pequeña hendidura del conector.
Finalmente tendremos el siguiente cable armado.
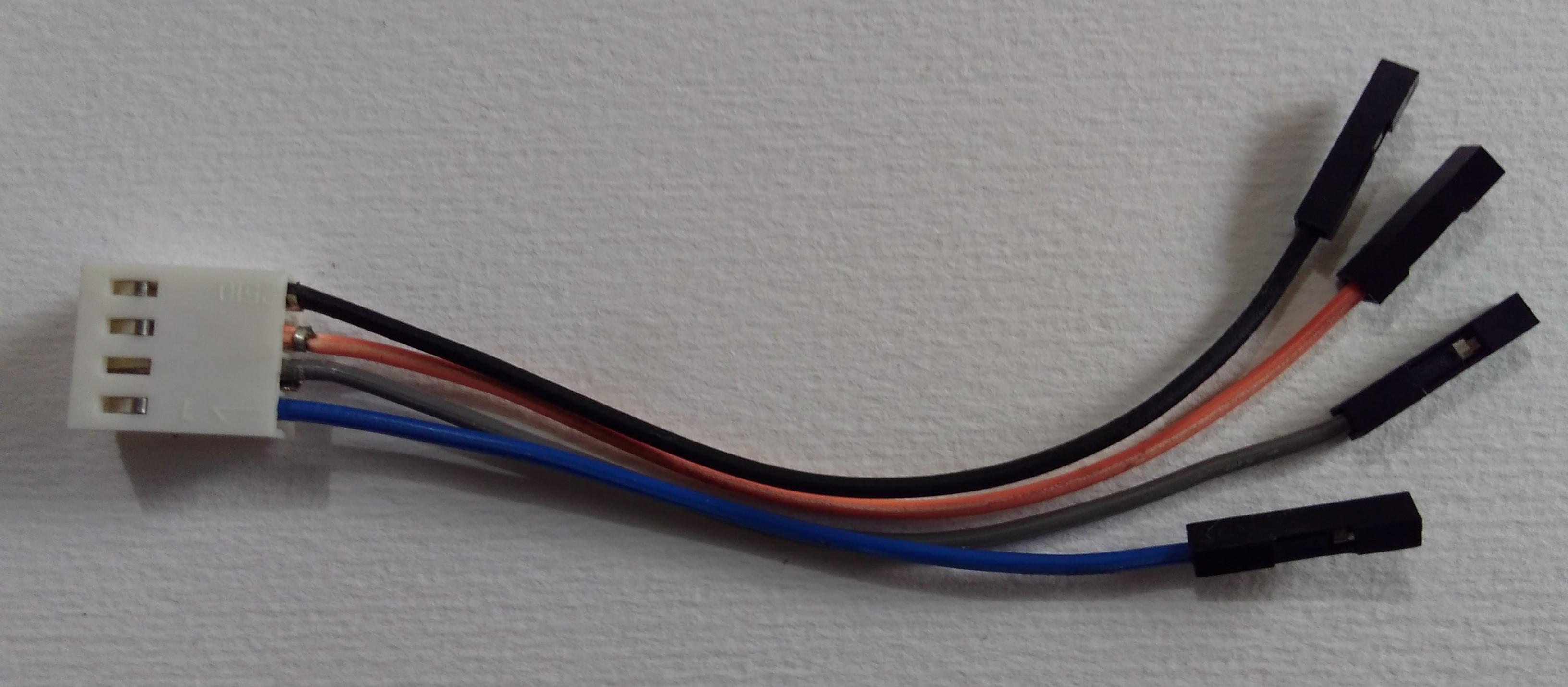
Para conectar el cable al display debes de cerciorarte hacerlo de manera adecuada, de lo contrario podria no funcionar e incluso podrias generar un cortocircuito que pondria en peligro la pantalla. En la siguiente imagen tenemos el cable posicionado de una manera en que el conector molex apunta con unas pestañas laterales hacia arriba, las hendiduras han quedado hacia abajo. El cable azul es GND, el gris es Vcc, el naranja es SCL y el negro es SDA, de esta manera deberas conectarlos a los pins que indica el Display OLED. Es probable que hallas utilizado cables de otros colores. No importa. Sólo asegurate de realizar la conexión en el mismo orden. Para cualquier duda te recomendamos consultar la imagen al inicio de la sección.
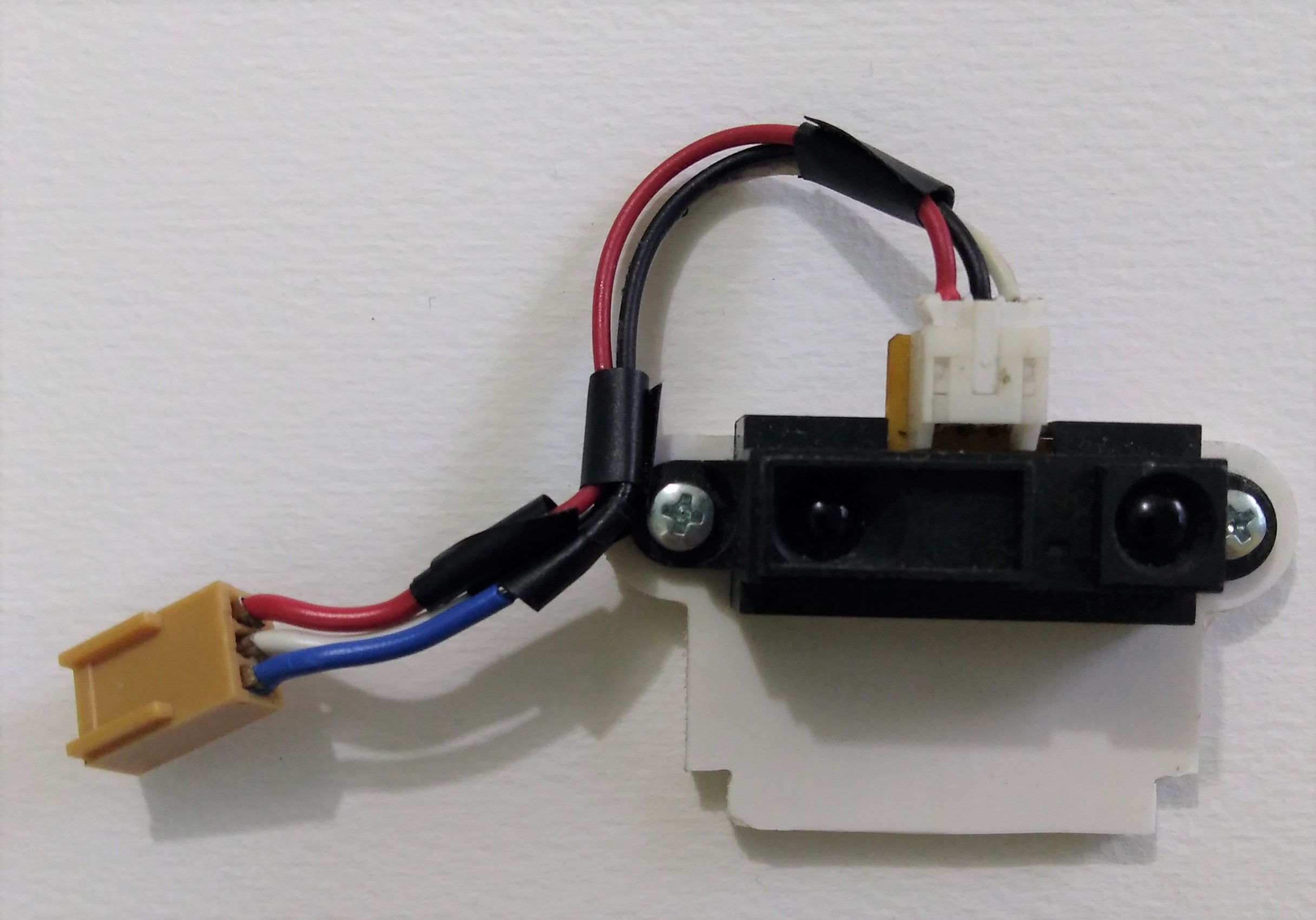
La conexión para el sensor Sharp es muy similar. En un extremo deberas colocar las laminillas y el conector molex hembra y del otro lado deberás realizar la conexión con el sensor Sharp (para este caso los cables deben ser de 15cm). De igual manera deberas asegurarte conectar correctamente el sensor y el conector molex. Las posiciones en el conector molex de izuierda a derecha es: azul GND, rojo Vcc y blanco señal de salida. Para cualquier duda te recomendamos consultar la imagen al inicio de la sección.
Como puedes observar el proceso se repite: Cable con conector molex en un extremo y en el otro lado, el dispositivo o sensor. A partir de ahora solo te indicaremos la posición en la que deberás conectar el sensor al conector molex.
De izquierda a derecha en el molex: GND, señal de salida del sensor y VCC.
Recuerda: Esta misma pocision debe coincidir con los pines del sensor. Para cualquier duda te recomendamos consultar la imagen al inicio de la sección.
Para el sensor de pulso, el cable es mas largo. Aproximadamente 30cm. En esta ocasión con las pestañas del conector molex hacia abajo y las hendiduras hacia arriba. De izquierda a derecha tenemos VCC, señal del sensor y GND. Para cualquier duda te recomendamos consultar la imagen al inicio de la sección.

Finalmente, deberás conectar la bateria. Con solo dos terminales VCC y GND es la más sencilla de todas.
Para cualquier duda te recomendamos consultar la imagen al inicio de la sección.

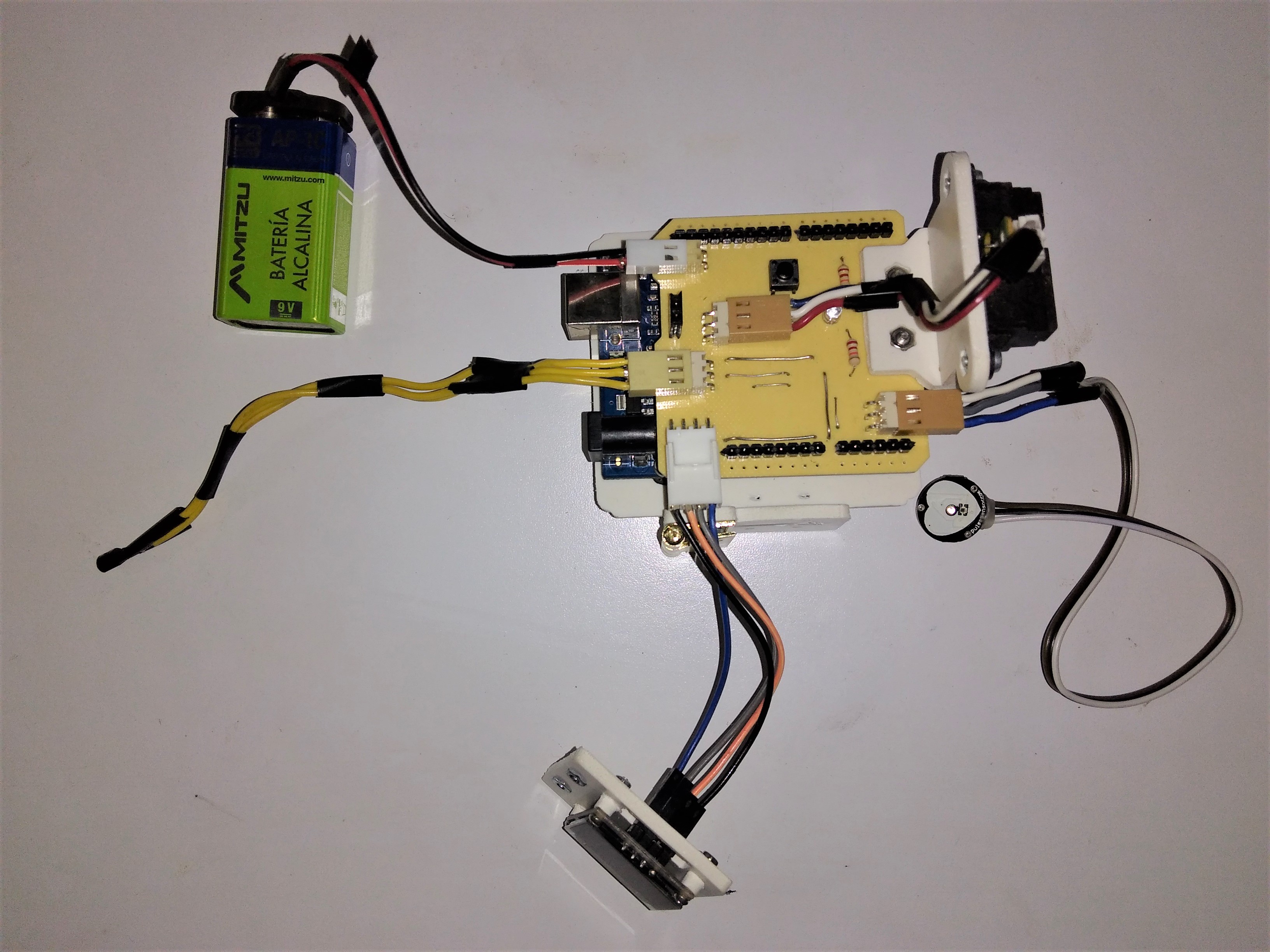
En la siguiente imagen te mostramos como deberá quedar ensamblado el circuito:
Colocando el sensor de pulso
Otro de los pasos importantes, es la correcta colocación del sensor de pulso en el guante. Debe estar en contacto con la yema del dedo indice en todo momento para poder realizar las lecturas. Para nuestro caso tenemos un guante que se diseñó a medida para este proyecto. Tiene un pequeño bolso para guardar la batería, un pedazo de velcro para fijar el circuito en la parte superior de antebrazo, y canal que va desde la altura de la muñeca hacia el dedo indice. Es en este canal que se inserta el sensor de pulso. Se realizó de esta manera para que quedaran ocultos los cables.
No te preocupes por no tener un guante idéntico, de hecho cualquiera te servirá, solo que deberás ingeniártelas para tener algo similar a esto. Te recomendamos realizar un orificio para el sensor de pulso, así podrás colocarlo dentro del guante (en el dedo indice, haciendo contacto con tu yema) y pasar los cables por dentro y hacia la salida para conectarlo al circuito.

Observa como hemos pasado el cable dentro del guante, y sale por la pequeña abertura para conectarse al circuito.

De esta manera el sensor de pulso queda en contacto con la llema del dedo índice

Fabricación del soporte
En esta sección te mostraremos cómo fabricar la estructura para la sujeción de los componentes electrónicos y el guante. Lo divertido aquí es que podrás fabricarla en cualquier impresora 3D. El soporte está conformado por 5 partes:
- Base Arduino
- Base sensor sharp
- Soporte sensor sharp
- Soporte pantalla OLED
- Sujetador pantalla OLED a Base Arduino
Instrucciones de ensamble - Video de ensamble total
Ha llegado el ansiado momento de dotar de funcionalidad el SpaceGlove.
A continuación te proporcionamos el enlace de GitHub donde podras descargar los archivos fuente. https://github.com/GustavoAEM/robotica-no-ingenieros/tree/master/SpaceGlove/SpaceGlove. Antes de cargar el código en tu tarjeta Arduino deberás instalar la librería que se encuentra en los archivos adjuntos. Para ello te recomendamos que sigas los pasos que vimos en esta publicación. Llegado el momento, deberás cargar el código en tu tarjeta de desarrollo y reiniciar pulsando el botón sobre tu Arduino. Una vez hecho esto observaras que se muestra una pequeña introducción en la pantalla OLED. A continuación comenzará tomar el pulso, deberás cerciorarte de que tu dedo índice hace contacto con el receptor del sensor de pulso. Pasados 30 segundos de muestreo verás el número de pulsos por minuto en el display.
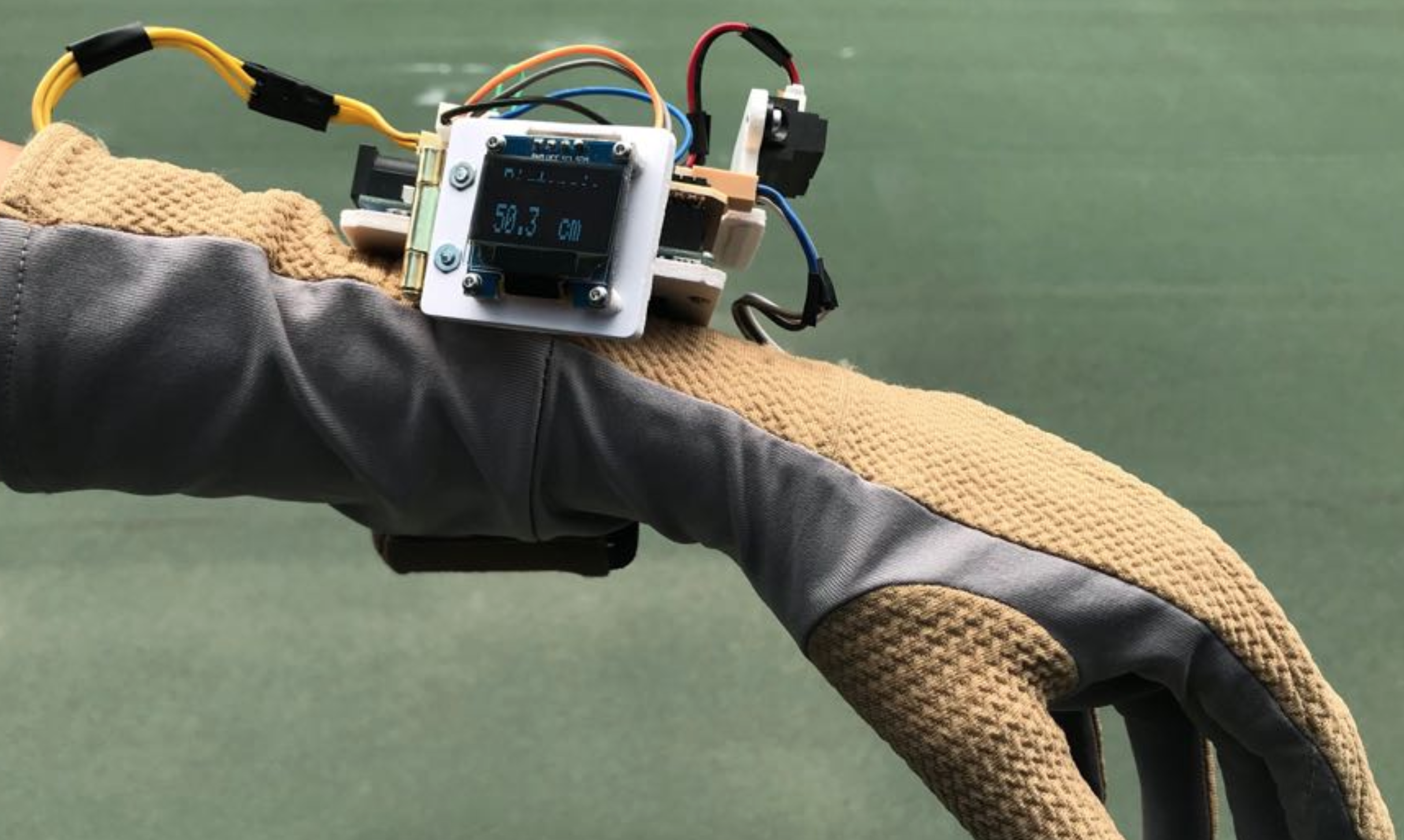
Además, si presionas el boton que se encuentra sobre el circuito que desarrollamos, entrarás en el modo de medicion de distancia, en dónde se activa el sensor Sharp y se habilita la funcionalidad de medición de distancia. Prueba apuntando a diferentes objetos dentro de un rango de 80cm para saber la distancia a la que se encuetran de tu mano.
Descarga los recursos para la fabricación de la tarjeta PCB y la estructura de soporte: