Si bien el camino de la construcción del conocimiento es largo, proponemos ahora una forma más sencilla de facilitar su construcción, a partir de permitir a los estudiantes o simples hobbistas de fin de semana, realizar diseños y montajes básicos de prototipos robóticos que cumplirán dos funciones: Permitir la construcción de conocimiento a partir de la comprobación de la teoría por experimentación directa.Fomentar la imaginación para el desarrollo de ideas innovadoras. De tal forma que tú, amigo lector, no requieres conocimientos previos en esta ocasión para construir tu primer prototipo robótico. Primero definamos el término “robot”. La palabra original es “robota”, que en idioma Checo significa “trabajos forzados”, se utilizó por vez primera en la obra de teatro “Rossum’s Universal Robot” (R.U.R.), donde un científico daba vida a una máquina con aspecto humano capaz de realizar actividades de un sirviente. De ahí que un robot es básicamente un esclavo que puede ejecutar actividades repetitivas, peligrosas o de precisión. Ahora, para que un robot sea considerado como tal, hay tres aspectos importantes que se deben de cumplir:
-Sentir. El robot debe tener la capacidad de percibir el mundo real a través de uno o varios tipos de sensores.
-Planificar. El robot debe tener cierta inteligencia que le permita determinar por medio de opciones, qué paso debe seguir y como actuar.
-Actuar. El robot debe tener uno o varios elementos que le permitan realizar cambios en el mundo físico, activando o desactivando uno o más actuadores.
Pero ojo! ningún robot es inteligente por sí mismo, ya que recuerda, cualquier robot, hasta el más avanzado, ha sido previamente programado por un ser humano.
Pasemos nuestra lista de materiales:
A.- 01 Protoboard grande.
B.- 02 Motorreductores eléctricos 1:120
C.- 02 Ruedas para motorreductores.
D.- 01 Rueda loca de 3/8”
E.- 01 Tarjeta de plástico que ya no utilices.
F.- 01 Cinta doble cara Scotch 3M.
G.- 02 Fotorresistencias LDR de 2 Megaohms.
H.- 04 Resistencias de 10 Kilo ohms, (Café, negro, naranja, oro).
I.- 01 Diodo Led flash de 5 mm, de tu color favorito.
J.- 01 Resistor de 470 Ohms, (Amarillo, violeta, café, oro).
K.- 02 Preset horizontal de 100 Kilohms.
L.- 01 Amplificador operacional LM358.
M.- 02 Transistores NPN, BC548.
N.- 02 Capacitor cerámico número 103.
O.- 02 capacitor electrolítico de 47uF, 25V.
P.- 01 Metro de alambre estañado calibre 22 AWG en color rojo.
Q.- 01 Metro de alambre estañado calibre 22 AWG en color negro.
R.- 01 Broche para pila de 9V.
S.- 01 Pila de 9V, “cuadrada”.
T.- 01 Frasco pequeño de pegamento Cianoacrilato (Kola Loka).
Herramienta necesaria:
Pinzas de corte diagonal.
Pinzas pela conductor.
Tijeras para papel.
Destornilladores de relojero.
Regla de 20 o 30 cm.
Marcador permanente punto fino.
Una vez que tengas todo el material en mano, elige un área de trabajo donde te sientas cómodo y que esté bien iluminada.
Tener alguna bebida refrescante y algún bocadillo listo ayuda mucho a relajarte mientras te diviertes trabajando.
Bien, primero identifica los componentes:

Ahora, con las pinzas de corte diagonal, realiza cortes de alambre de una longitud de 8 cm., una vez hecho esto, retira el forro del aislamiento con ayuda de las pinzas “pela conductor”, recuerda que es calibre 22 AWG.

Ahora, coloca a los motorreductores, un poco de cinta doble cara que previamente hayas cortado con la tijera, para que quede como se muestra en la imagen:

Lo siguiente es recortar la tarjeta de plástico para pegar ahí la rueda loca con cinta doble cara.
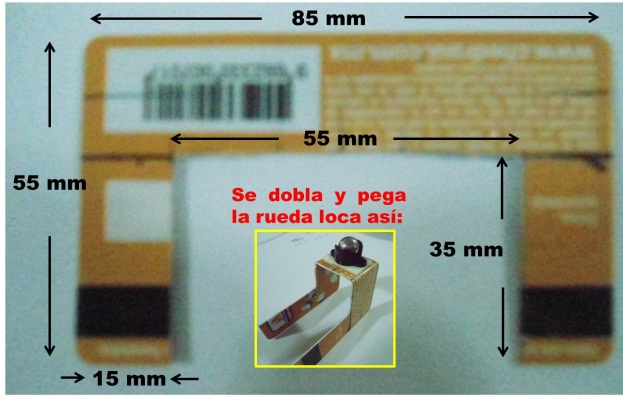
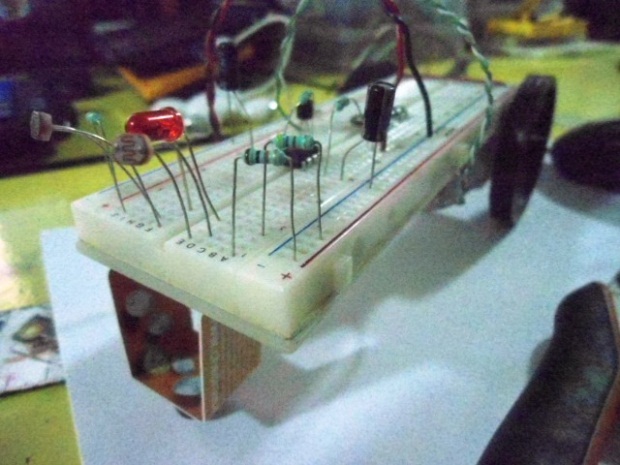
Ahora, debemos realizar algunos dobleces a la tarjeta de plástico para pegarla con la cinta doble cara junto con los motorreductores al protoboard y que todo quede a la misma altura con el protoboard nivelado.
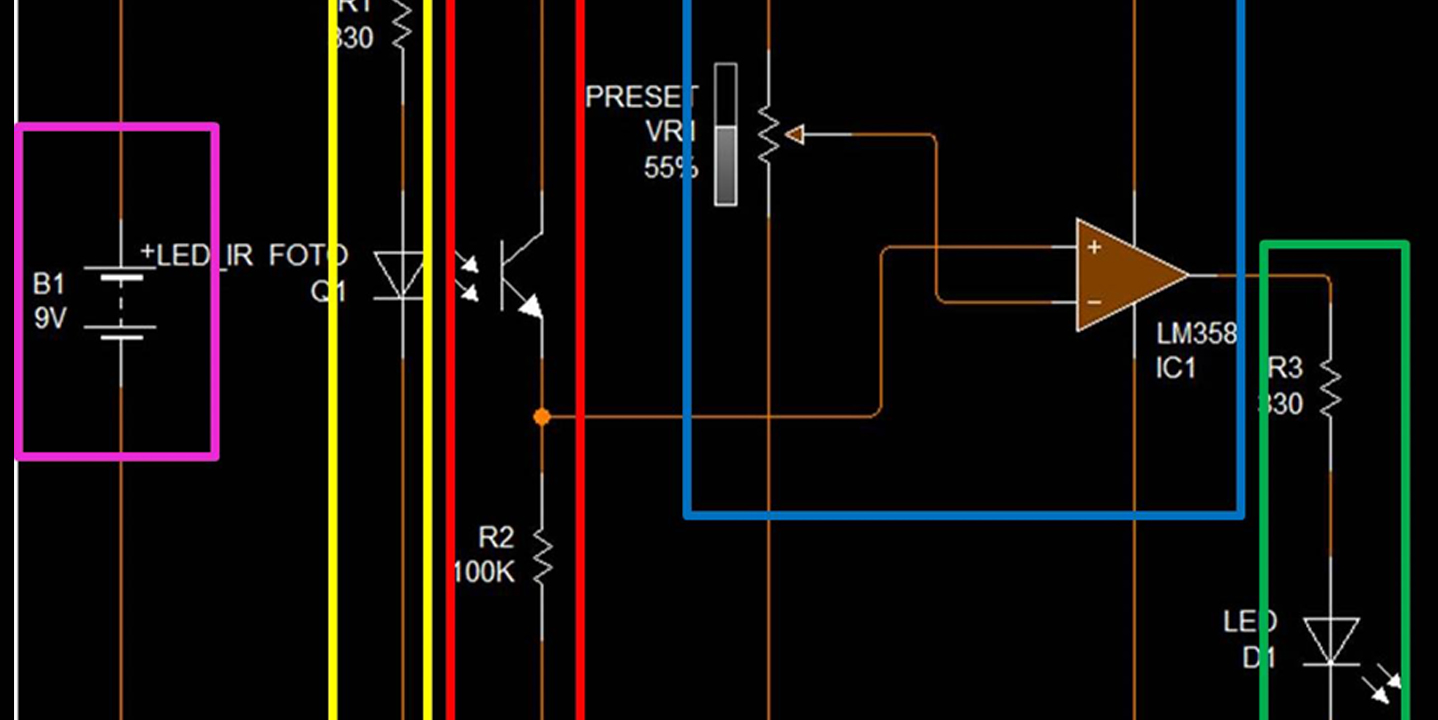
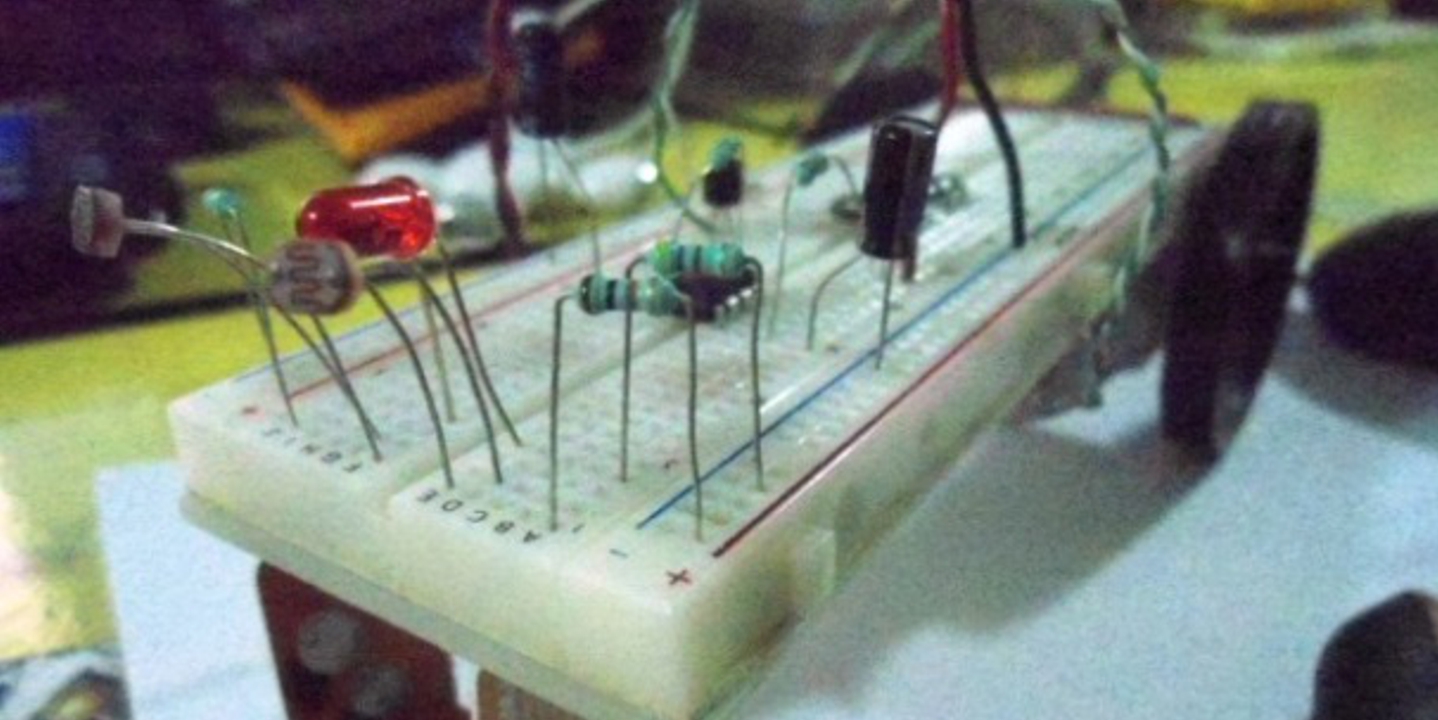
Ahora viene la parte electrónica, para ello coloca los componentes como se indica en la figura. Sigue el sistema de coordenadas del protoboard para no equivocarte.
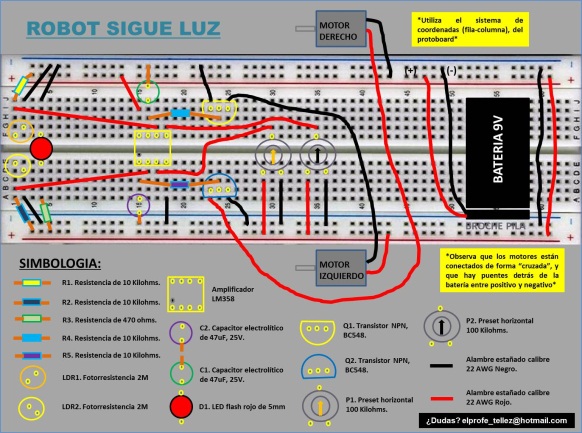
Amplificador LM358: la patilla 1 en el nodo E15 y la patilla 8 en el nodo F15.
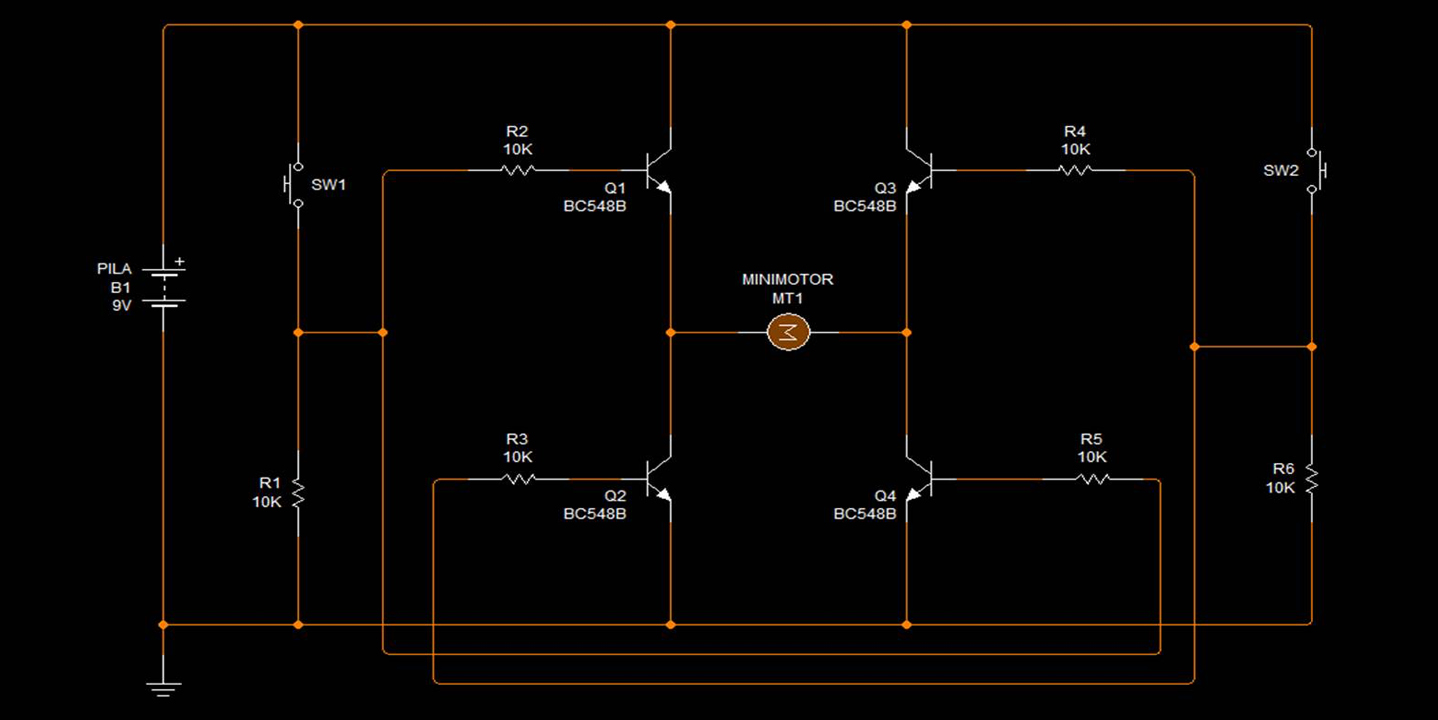
Transistor Q1: Nodos I23, I24 y I25.
Transistor Q2: Nodos B23, B24 y B25.
Resistores de 10K (identifícalos por el color), R1 en nodos J1 y positivo. R2 en nodos A1 y positivo. R3 en nodos A4 y positivo. R4 en nodos H16 y H24. R5 en nodos C15 y C24.
LED D1, patilla larga a nodo E4 y patilla corta a nodo F4.
LDR1 en nodos F1 y G2. LDR2 en nodos C2 y E1.
Capacitores electrolíticos, C1 patilla larga en nodo J16 y patilla corta al negativo, C2 patilla larga en nodo A15 y patilla corta al negativo.
Preset P1, en nodos F30, D29 y D31; Preset P2, en nodos F35, D34 y D36.
Lo que sigue es conectar los puentes de alambre conductor que cortaste al inicio. Ubícalos de acuerdo al esquema, y no olvides conectar los puentes detrás de la batería entre positivo y negativo.

Los motorreductores se deben conectar “cruzados”, con la finalidad de que el “ojo” derecho del robot controle el motor izquierdo, y el “ojo” derecho controle el motor izquierdo, de esta manera el robot no perderá de vista la luz.
Solo resta conectar el broche de la pila de 9V al bus de alimentación del protoboard (sin conectar aún la pila).
Ahora realicemos la siguiente verificación:
-
Checa que ningún alambre desnudo esté haciendo contacto con otro.
-
Verifica que los dos preset estén colocados al centro del cursor, como en el esquema, mirando hacia arriba, de no ser así, gira cada uno con un destornillador de relojero.
-
Dobla ligeramente las terminales de las fotorresistencias para que queden
-
viendo al frente del robot, como sus ojos.
-
Ten a la mano una lámpara con buena luz que puedas apuntar a los “ojos” del robot, ya sea a la izquierda, derecha o centrar ambos.
-
Conecta la pila de 9V y colócala a modo de que no caiga del protoboard. Le puedes poner un poco de cinta doble cara.
-
Los preset regulan el Umbral de cantidad de luz necesaria para que el robot comience a trabajar, si los giras a la derecha el robot requerirá poca luz, si los giras a la izquierda necesitará más luz para funcionar.
Ahora que hemos terminado la construcción de tu primer robot, aplicando las bases teóricas la dela teoría de sensores, transistores y amplificadores como comparadores, puedes ideártelas para hacer que también huya de la luz y prefiera la obscuridad, y recuerda, tu robot Siente, Planifica y Actúa. Disfrútalo y presúmelo a tus familiares y amigos!
Recuerda analizar su operación y visitar www.alldatasheet.com para descargar las hojas de datos de los componentes utilizados para comprender mejor su funcionamiento.
Comentarios y dudas: elprofe_tellez@hotmail.com